智能工控
智能开发
数据结构与算法
数据分析
机器学习
大模型
编程开发
后端开发
前端开发
移动开发
数据库
学习课程
下载
牛翰社区
发布
发布文章
创建话题
创建圈子
发布帖子
开通会员
开通黄金会员
全站资源折扣购买
部分内容免费阅读
一对一技术指导
VIP用户专属QQ群
开通黄金会员
开通钻石会员
全站资源折扣购买
部分内容免费阅读
一对一技术指导
VIP用户专属QQ群
开通钻石会员
登录
注册
智能工控
智能开发
数据结构与算法
数据分析
机器学习
大模型
编程开发
后端开发
前端开发
移动开发
数据库
学习课程
下载
牛翰社区
开通会员 尊享会员权益
登录
注册
找回密码
66
更多资料
搜索内容
Gaowaly
关注
私信
文章
0
收藏
0
评论
0
圈子
0
帖子
8
粉丝
0
发布
8
排序
最新发布
最近更新
最新回复
最多查看
最高评分
最多回复
最多收藏
Gaowaly
7个月前更新
5次阅读
关注
私信
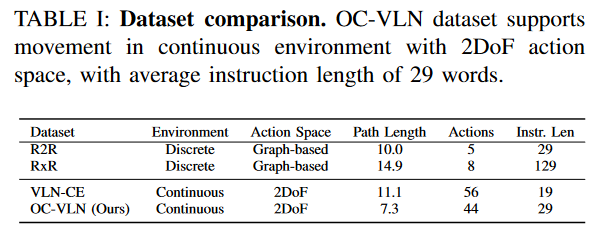
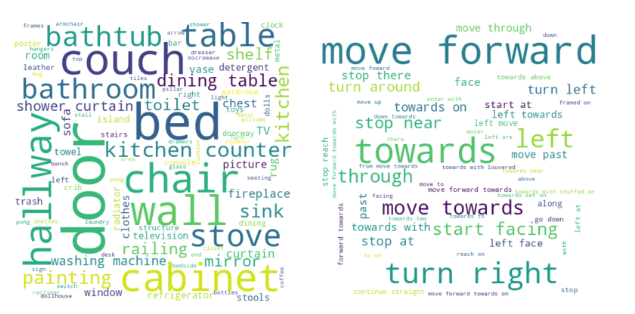
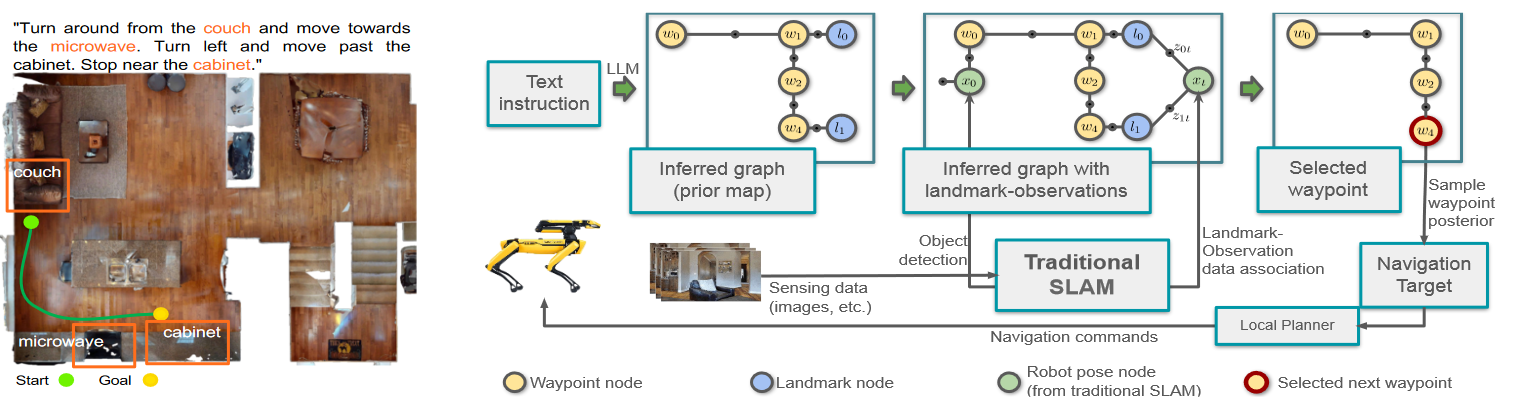
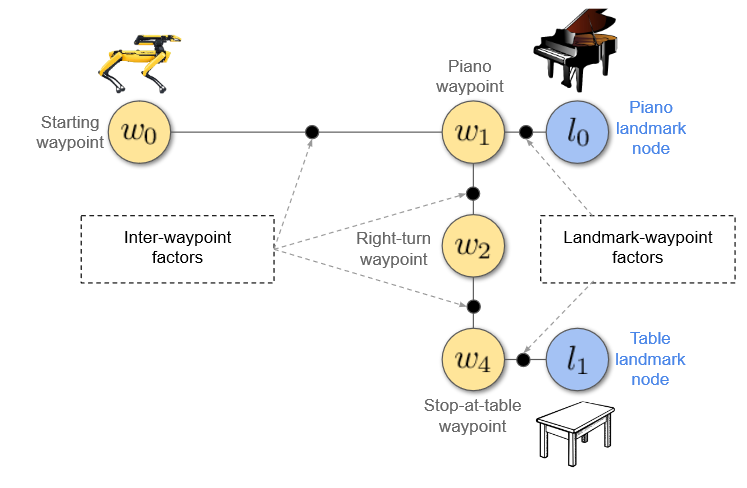
NL-SLAM for OC-VLN: Natural Language Grounded SLAM for Object-Centric VLN
NL-SLAM for OC-VLN: Natural Language Grounded SLAM for Object-Centric VLN
用于 OC-VLN 的 NL-SLAM:用于以对象为中心的 VLN...
+11
后端开发
评分
回复
分享
Gaowaly
7个月前更新
8次阅读
关注
私信
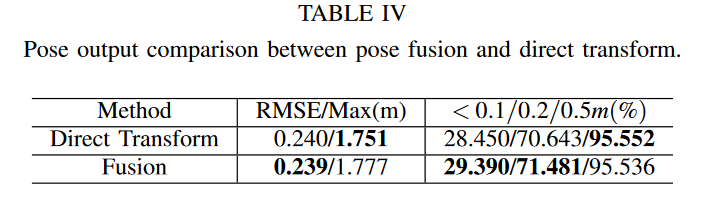
A Method of Setting the LiDAR Field of View in NDT Relocation Based on ROI
基于ROI的NDT重定位激光雷达视场设置方法
期刊:MDPI
单位:山东理工大学 摘要: 在高精度地图自动导航的重定位图中,激光雷达布...
+24
智能开发
评分
回复
分享
Gaowaly
7个月前更新
9次阅读
关注
私信
贪吃蛇小游戏C++
// 禁用特定的编译器警告
#pragma warning(disable:4996)
// 包含所需的头文件
#include<iostream>
编程算法
评分
回复
分享
Gaowaly
7个月前更新
12次阅读
关注
私信
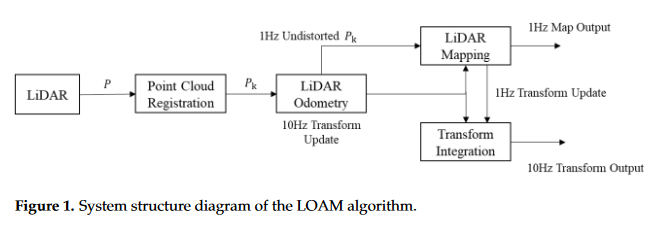
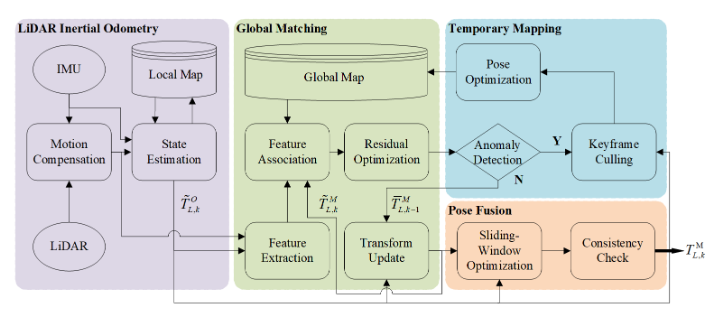
ROLL: Long-Term Robust LiDAR-based Localization With Temporary Mapping in Changing Environments
开源代码:GitHub - HaisenbergPeng/ROLL: A real-time, robust LiDAR-inertial localization system
ROLL: Long-Term Robust Li...
+23
智能开发
评分
回复
分享
Gaowaly
7个月前更新
8次阅读
关注
私信
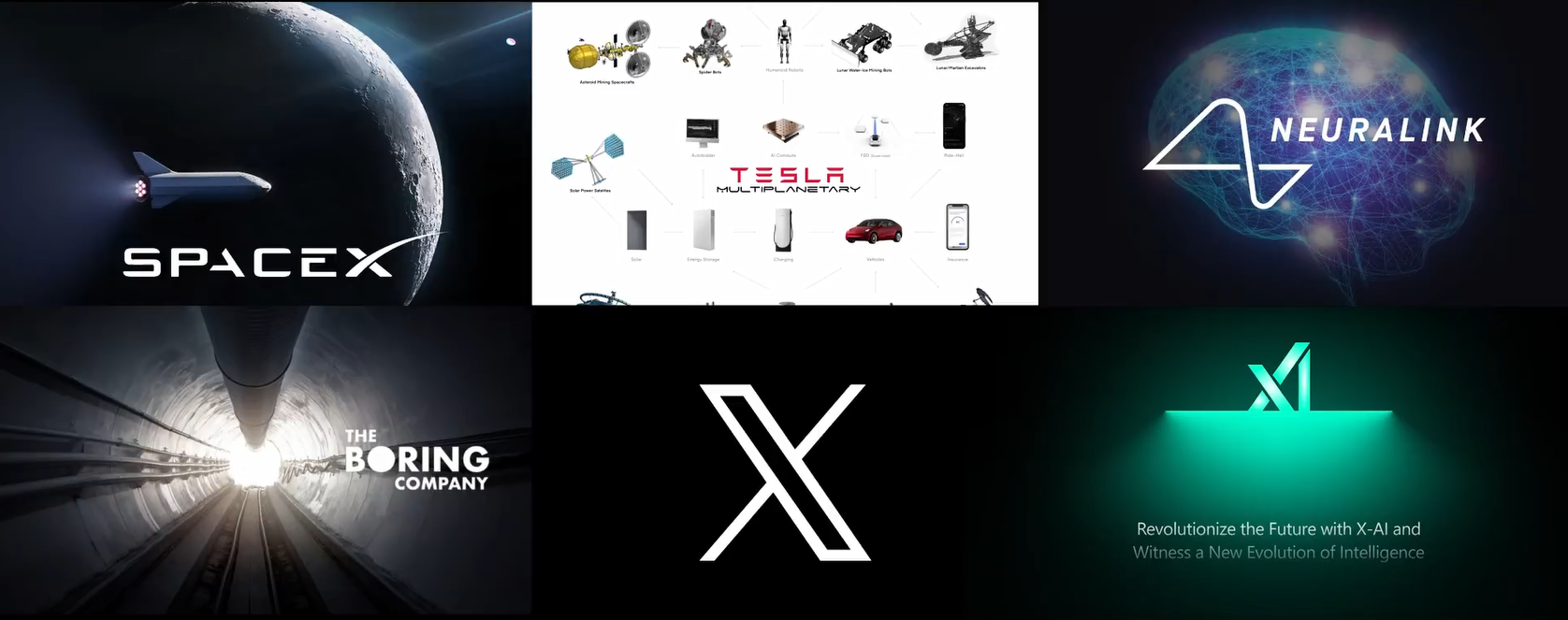
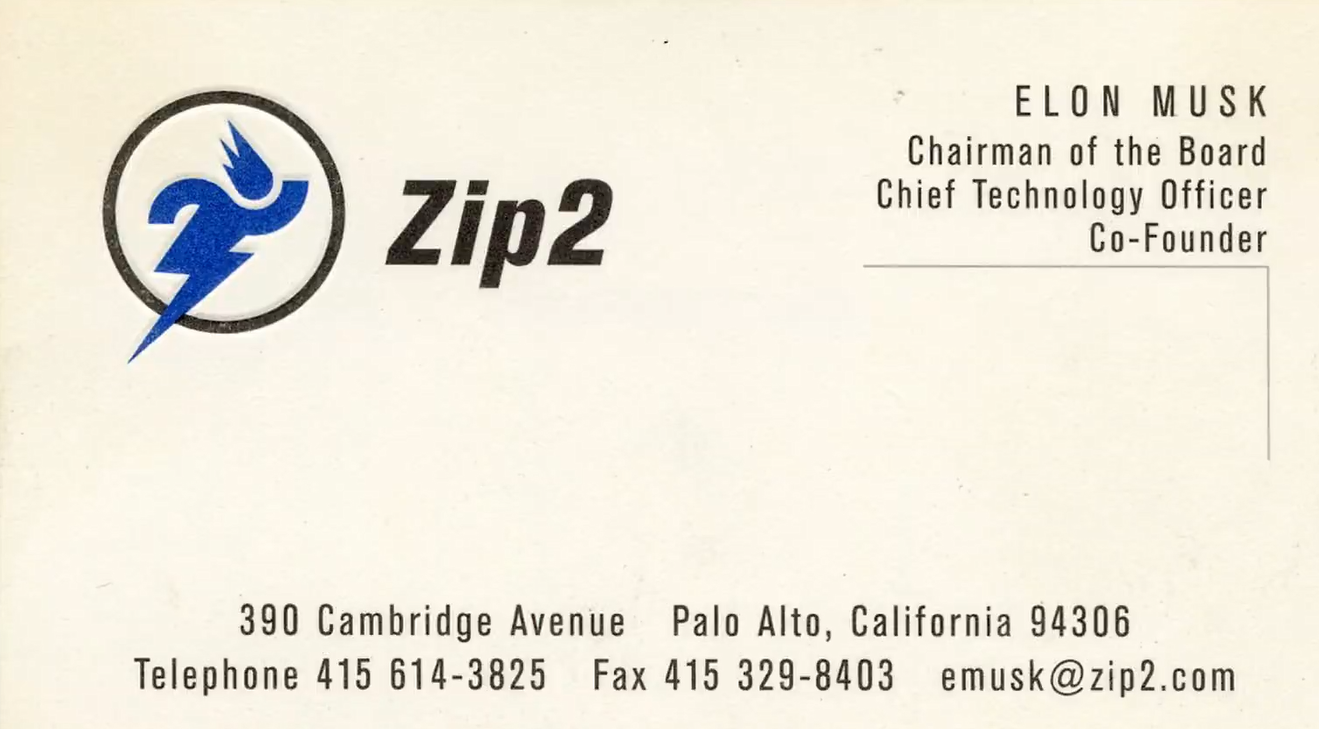
马斯克的商业帝国
马斯克的商业帝国 最近重温钢铁侠2的时候,又看到了当年年轻帅气的马斯克。 好的,马斯克先生,他好吗吗?好吧,祝贺你荣生。 哎...
后端开发
评分
回复
分享
Gaowaly
7个月前更新
13次阅读
关注
私信
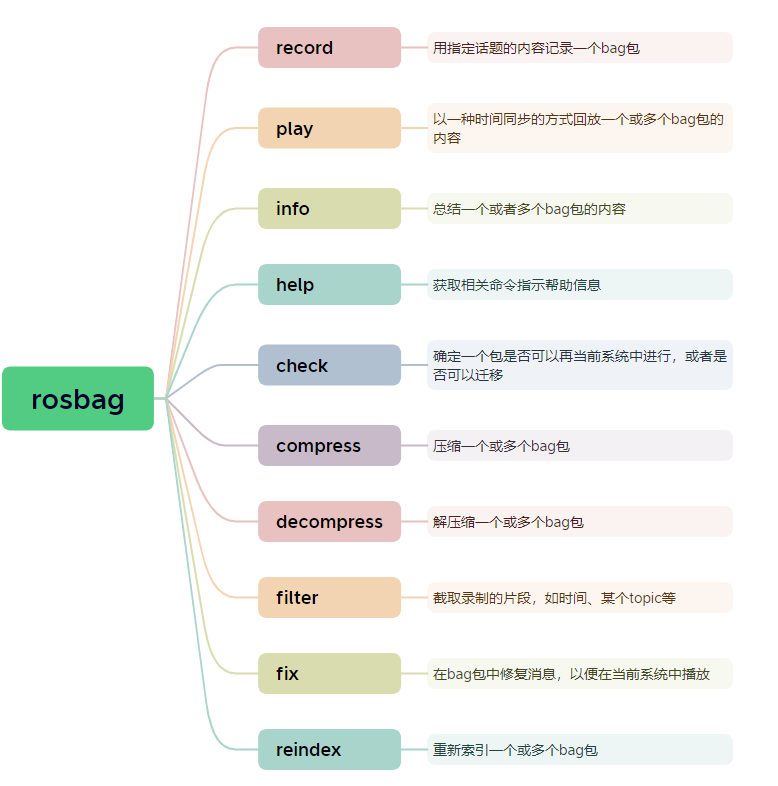
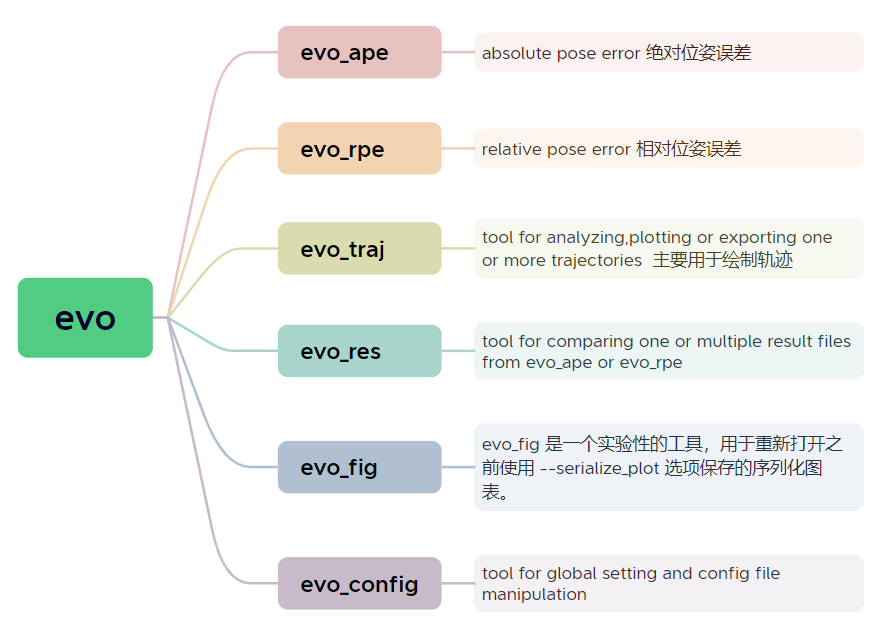
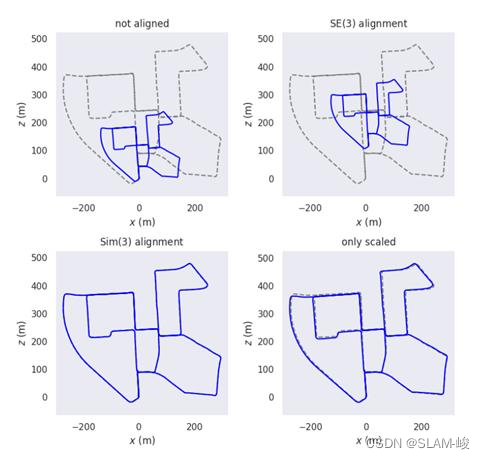
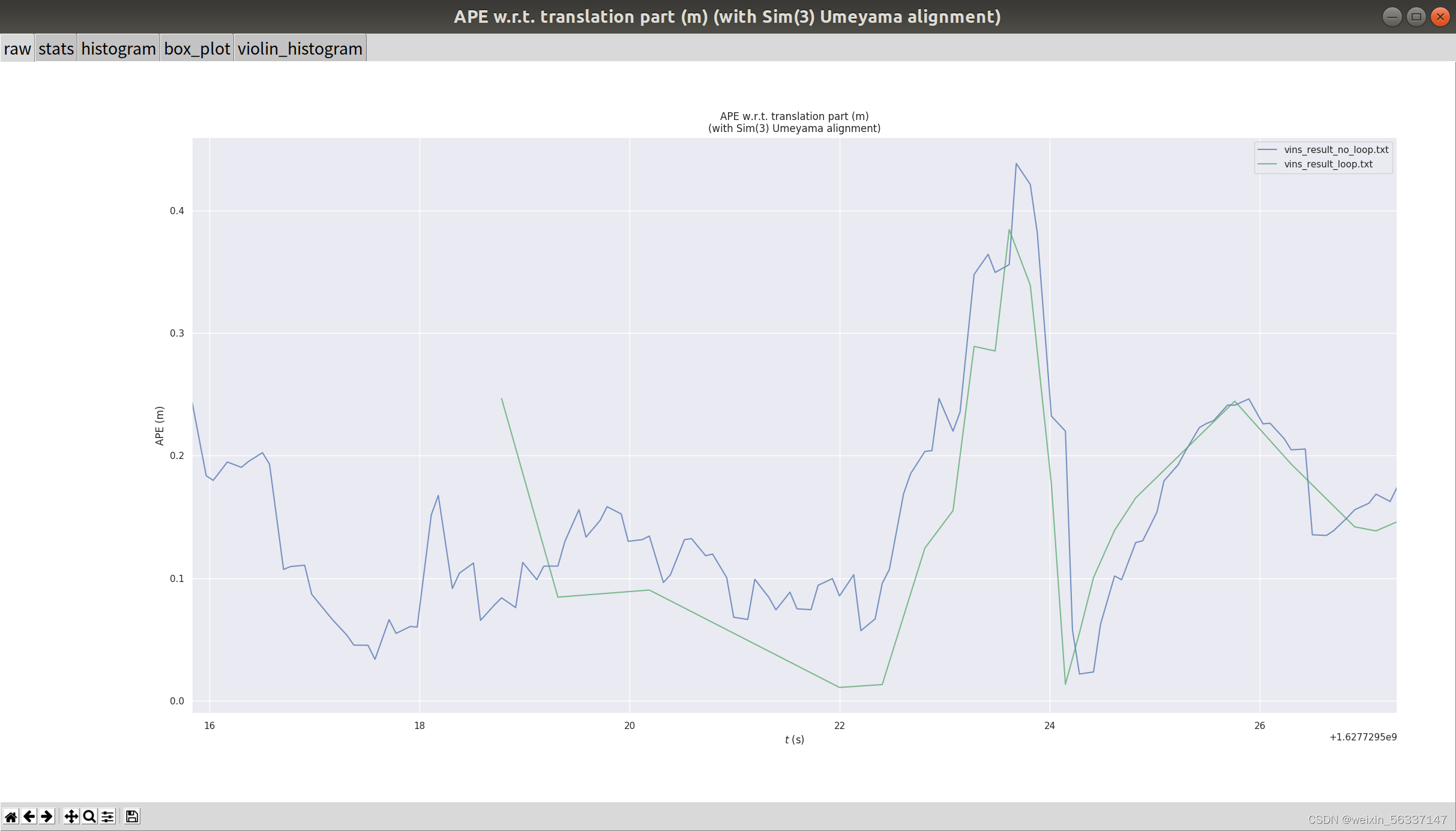
rosbag&evo
本文主要介绍Rosbag和evo常用的一些命令。
一、rosbag命令详细解读
1. rosbag record 录制时使用
rosbag record -a 录制所有话题...
+1
智能开发
评分
回复
分享
Gaowaly
7个月前更新
9次阅读
关注
私信
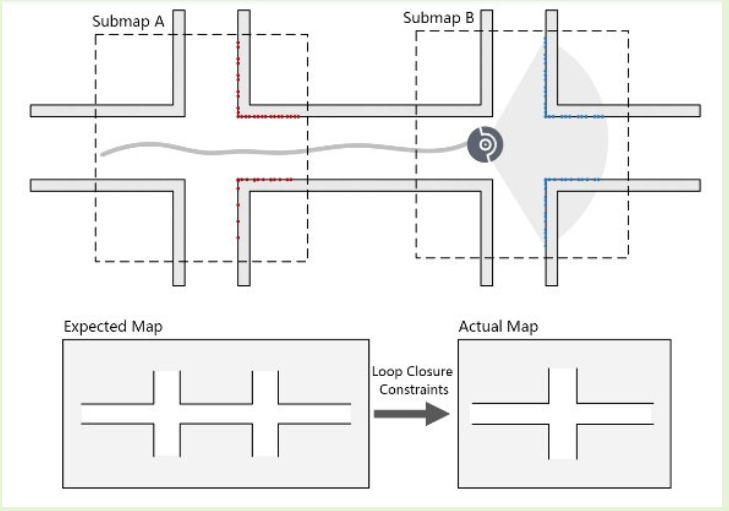
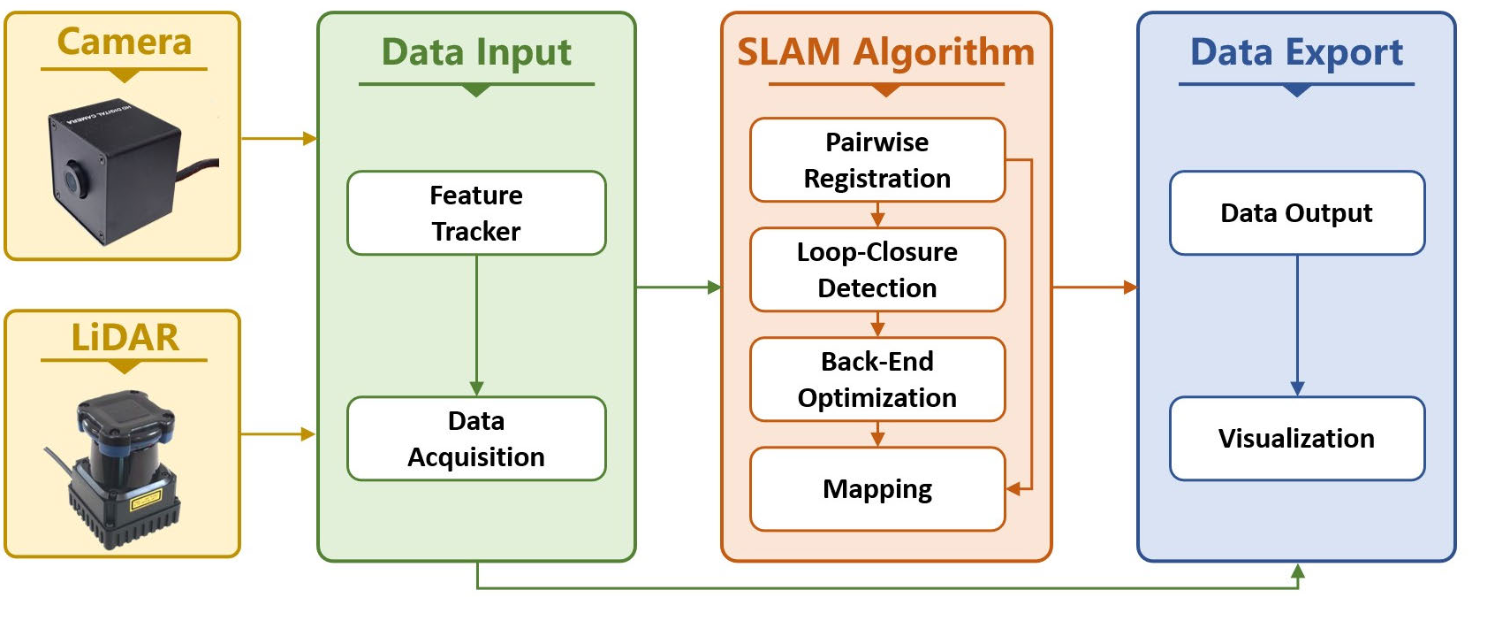
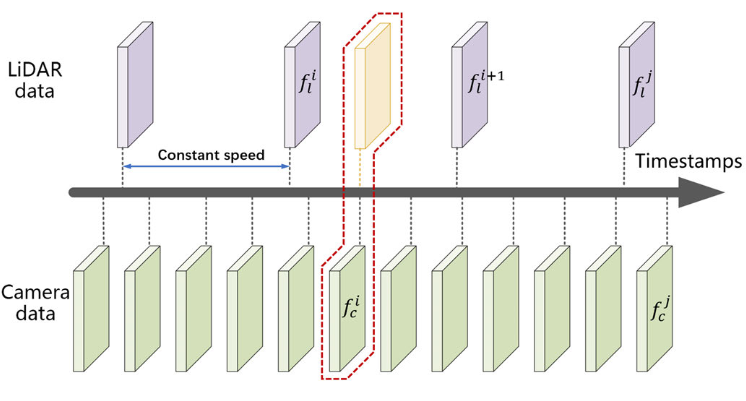
A 2-D LiDAR-SLAM Algorithm for Indoor Similar Environment With Deep Visual Loop Closure
具有深度视觉闭环的室内类似环境的二维 LiDAR-SLAM 算法
A 2-D LiDAR-SLAM Algorithm for Indoor Similar Environment With Deep...
+30
前端开发
评分
回复
分享
Gaowaly
7个月前更新
2次阅读
关注
私信
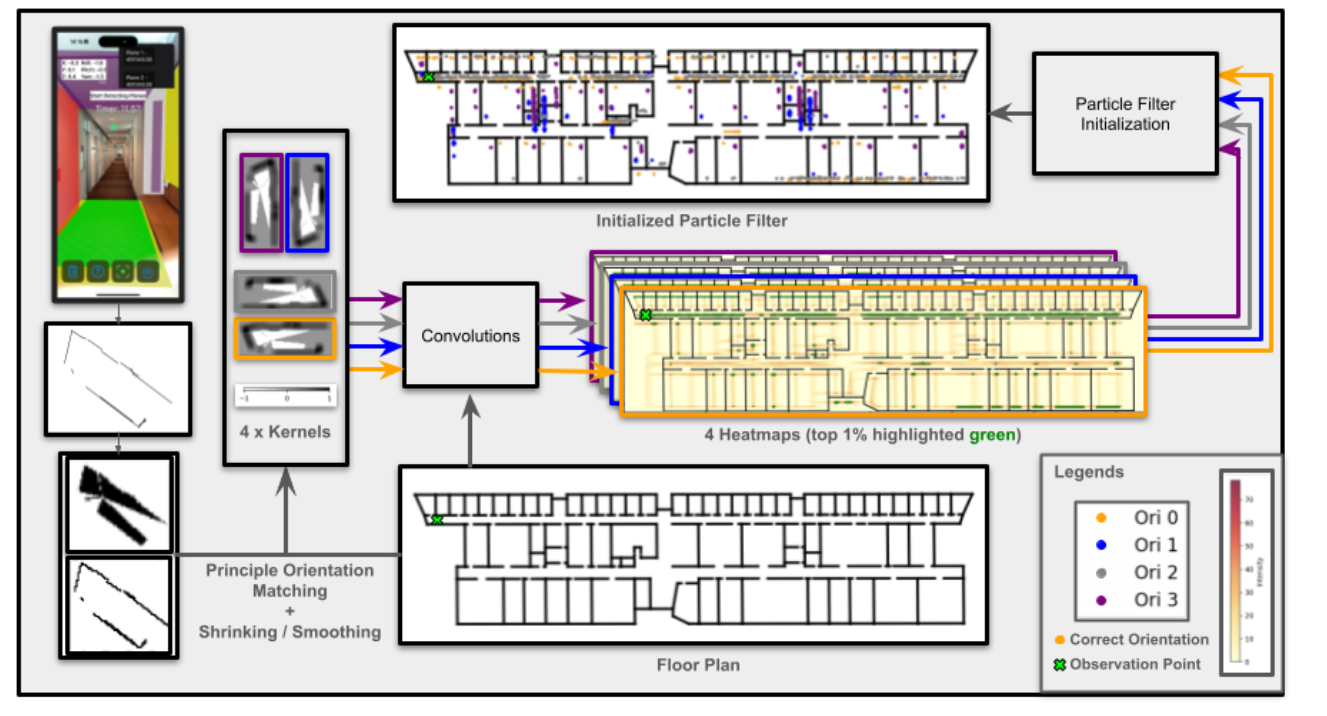
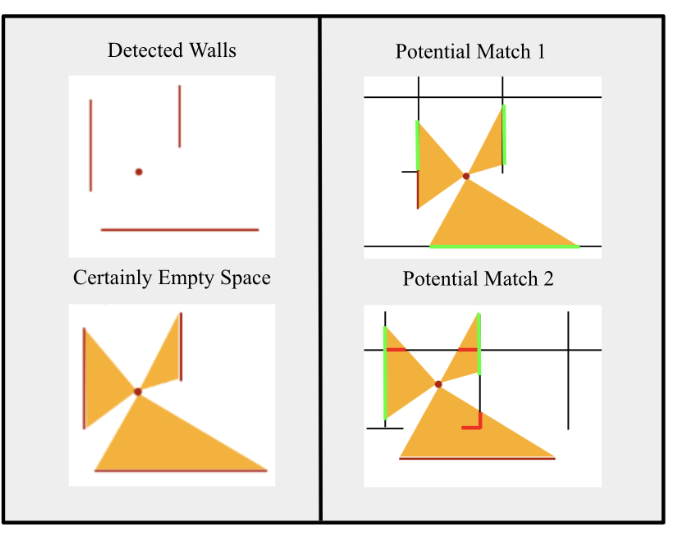
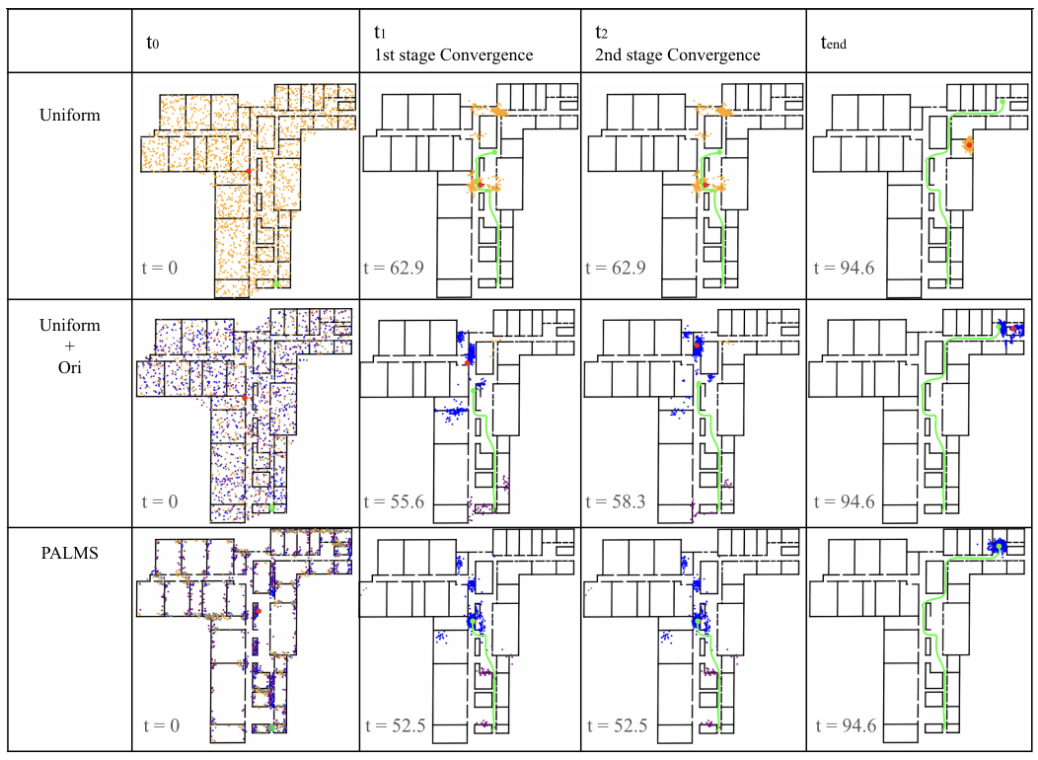
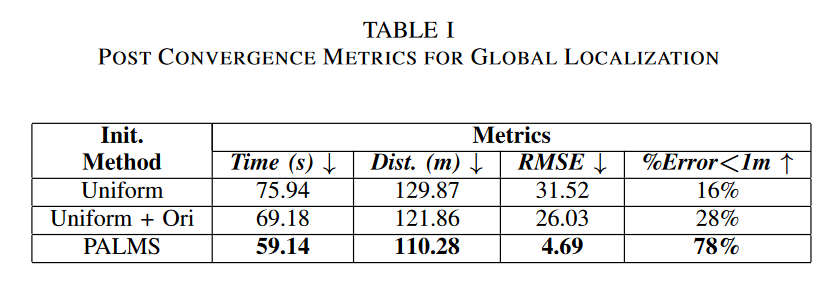
PALMS: Plane-based Accessible Indoor Localization Using Mobile Smartphones
arxiv | 加州大学待开源 PALMS: 使用移动智能手机的基于平面的无障碍室内定位 【PALMS: Plane-based Accessible Indoor Localiza...
后端开发
评分
回复
分享
发布文章
创建话题
创建圈子
发布帖子
在手机上浏览此页面
登录
没有账号?立即注册
用户名或邮箱
登录密码
记住登录
找回密码
登录
注册
已有账号,立即登录
设置用户名
设置密码
重复密码
注册