


51c视觉~合集22
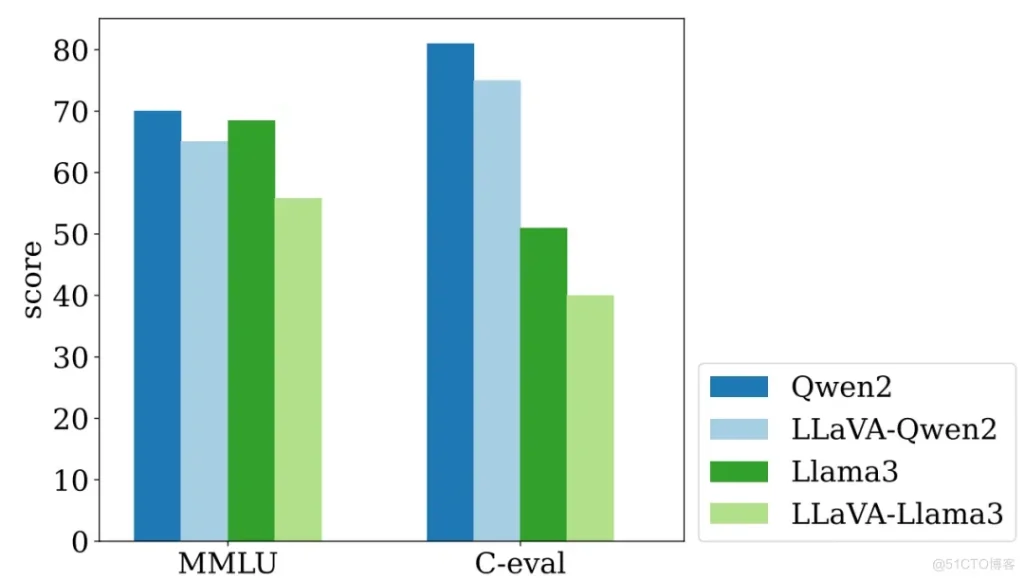
#IAA 冻结语言模型训练LMM新范式,360提出IAA,使语言模型无损获取多模态理解与Grounding能力! 本篇分享论文IAA: Inner-Adaptor Architecture Empowers Frozen Large Language Model with Mult...
51c视觉~合集23
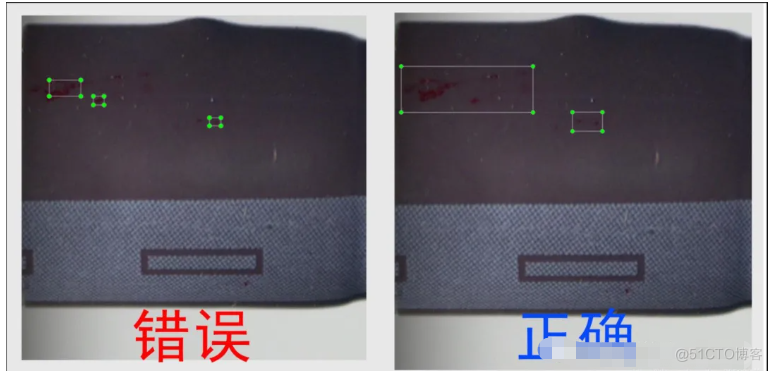
#工业缺陷检测中数据标注需要注意的几个事项 在工业场景中,网络结构决定了下限,数据决定着上限,要想模型有好的表现,数据是至关重要的。下面就这个项目来说一说,工业缺陷检测在标注数据时需...

51c自动驾驶~合集21
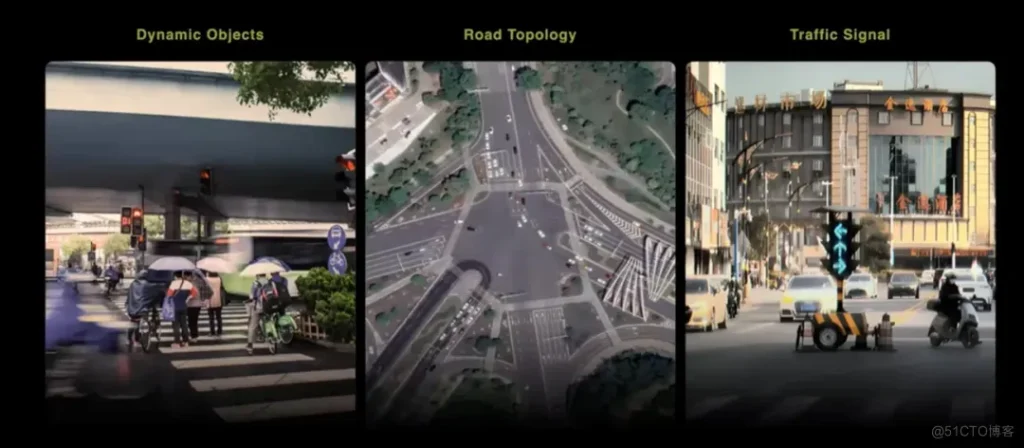
#Open3DWorld 突破感知极限!自动驾驶中的开放3D World 开放词汇感知的能力代表了自动驾驶系统的重大进步,促进了实时整合和解释各种文本输入。尽管对2D计算机视觉中的开放词汇任务进行了广泛的...
51c视觉~合集21
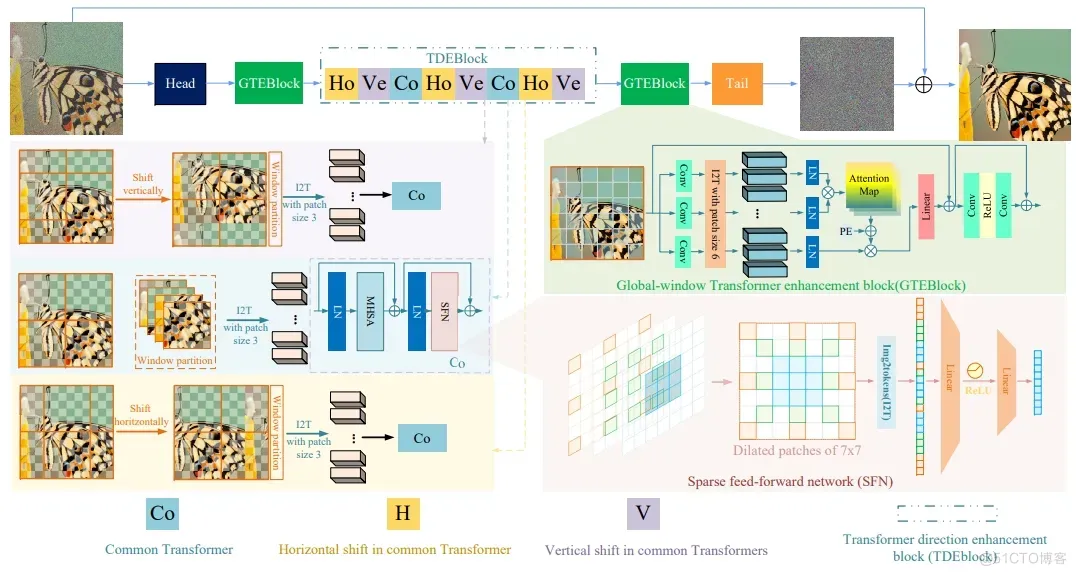
#HWformer 西工大&台湾清华&西电&港中文 3位 IEEE Fellow 提出异构窗口 Transformer 的图像去噪方法 本文分享论文Heterogeneous window Transformer for image denoising,HWformer...
51c视觉~合集20
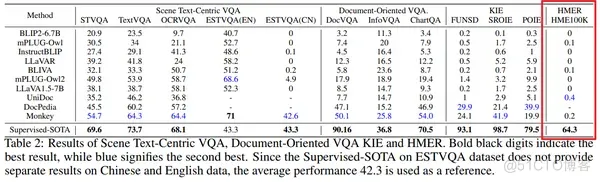
#PosFormer 本文简要介绍被ECCV 2024录用的论文PosFormer: Recognizing Complex Handwritten Mathematical Expressions with Position Forest Transformer,上交推出 PosFormer!优化位置识别任...
51c自动驾驶~合集20
#WaterSplatting 快速重建水下世界 水下重建的挑战 神经辐射场(NeRFs)能够提供逼真的3D场景重建质量,3DGS在渲染质量方面可以与NeRF媲美,并且提供了实时渲染速度、更好的可编辑性和控制能力...
51c视觉~合集19
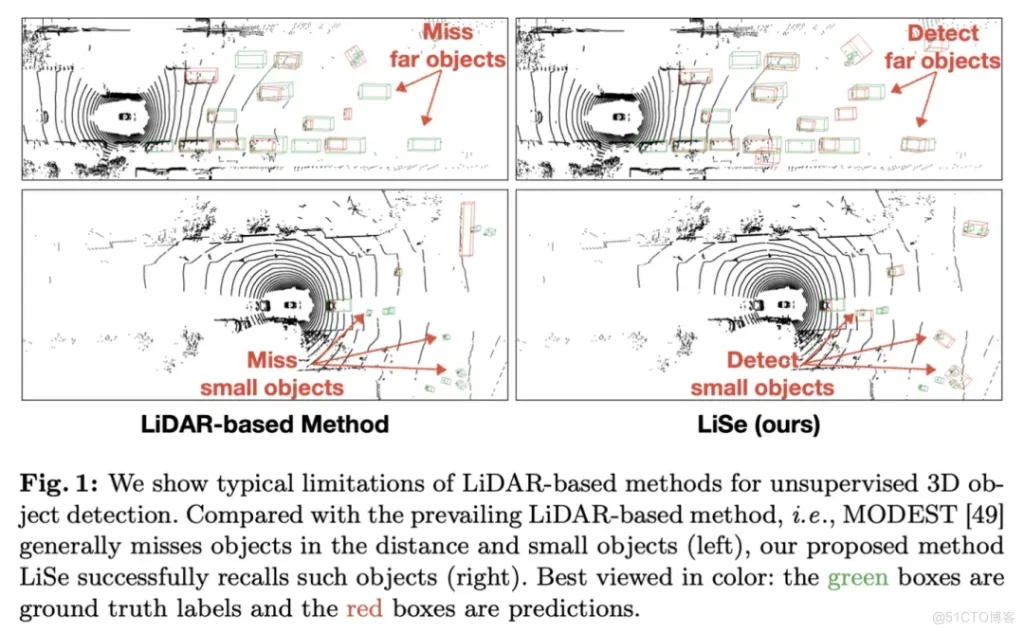
#LiSe 澳门大学提出使用2D场景扩展无监督3D目标检测 论文提出一种新颖的基于伪标签的自适应学习框架LiSe。LiSe使用2D场景中的丰富语义信息增强无监督3D目标检测,同时提出自适应采样策略与弱模...
51c自动驾驶~合集19
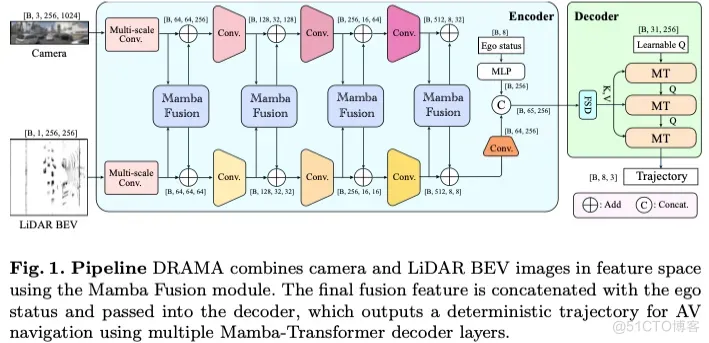
#DRAMA 首个基于Mamba的端到端运动规划器 运动规划是一项具有挑战性的任务,在高度动态和复杂的环境中生成安全可行的轨迹,形成自动驾驶汽车的核心能力。在本文中,我们提出了DRAMA,这是第一个...
51c视觉~合集18
#DeepLabV3~植叶病害检测 使用深度学习进行疾病检测是加快植物病理学过程的好方法。在大多数情况下,在使用深度学习时,我们会使用图像分类或疾病(对象)检测。但我们也可以使用语义分割。在某...
51c自动驾驶~合集18
#DDMPC-for-AV-steering 同济大学 | 用于自动驾驶汽车转向的数据驱动模型预测控制 论文链接:https://arxiv.org/pdf/2407.08401 项目主页:https://john0915aaa.github.io/DDMPC-for-AV-steerin...
