



前言
ConcurrentHashMap是一个线程安全的HashMap,主要用于解决HashMap中并发问题。
在ConcurrentHashMap之前,也有线程安全的HashMap,比如HashTable和Collections.synchronizedMap,但普遍效率低下。
Hashtable效率不高是因为它对数据操作的时候都会通过synchronized上锁,也就是我们在讲synchronized说的同步方法。而Collections.synchronizedMap的效率不高是因为在SynchronizedMap内部维护了一个普通对象Map,还有 排斥锁mutex,我们在调用这个方法的时候就需要传入一个Map,mutex参数可以传也可以不传。创建出synchronizedMap之后,再操作map的时候,就会对这些方法上锁(如下),也就是我们说的同步代码块,所以性能不高。

因此,才有了JDK1.5引入的ConcurrentHashMap!
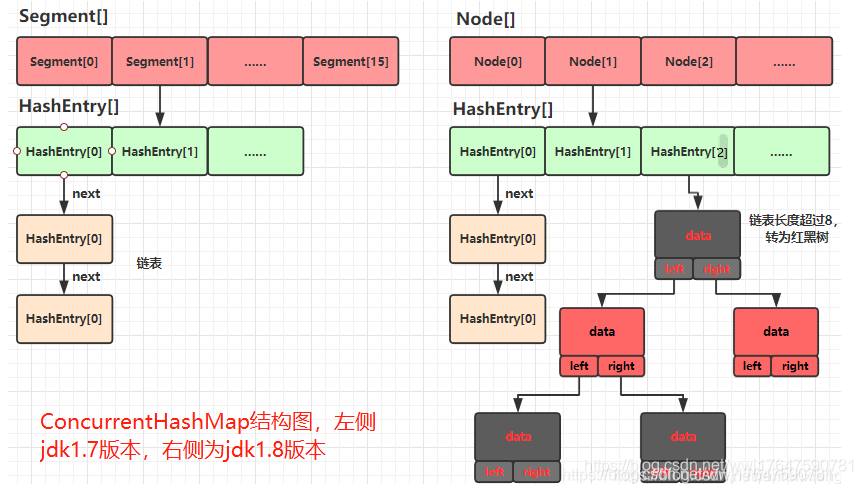
ConcurrentHashMap在JDK1.7之前变化不大,在1.8中修改了较多,下面分析一下1.7和1.8中的变化:
- 锁方面: 由分段锁(
Segment继承自ReentrantLock)升级为 CAS+synchronized实现; - 数据结构层面: 将
Segment变为了Node,减小了锁粒度,使每个Node独立,由原来默认的并发度16变成了每个Node都独立,提高了并发度; - hash冲突: 1.7中发生hash冲突采用链表存储,1.8中先使用链表存储,后面满足条件后会转换为红黑树来优化查询。由于使用了红黑树,jdk1.7中链表查询复杂度为O(N),jdk1.8中红黑树优化为O(logN))。
继承与实现
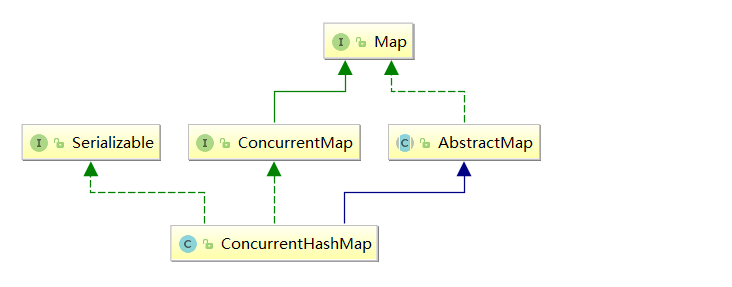
public class ConcurrentHashMap<K,V> extends AbstractMap<K,V>
implements ConcurrentMap<K,V>, Serializable
可以看到ConcurrentHashMap继承了AbstractMap,实现了ConcurrentMap和Serializable。
AbstractMap,这是一个java.util包下的抽象类,提供Map接口的骨干实现,以最大限度地减少实现Map这类数据结构时所需的工作量,一般来讲,如果需要重复造轮子——自己来实现一个Map,那一般就是继承AbstractMap。
ConcurrentHashMap实现了ConcurrentMap这个接口,ConcurrentMap是在JDK1.5时随着J.U.C包引入的,这个接口其实就是提供了一些针对Map的原子操作:
package java.util.concurrent;
import java.util.Map;
import java.util.Objects;
import java.util.function.BiConsumer;
import java.util.function.BiFunction;
import java.util.function.Function;
public interface ConcurrentMap<K,V> extends Map<K,V> {
//返回指定key对应的值;如果Map不存在该key,则返回defaultValue
default V getOrDefault(Object key, V defaultValue) { ...}
//遍历Map的所有Entry,并对其进行指定的aciton操作
default void forEach(BiConsumer<? super K, ? super V> action) {...}
//如果Map不存在指定的key,则插入<K,V>;否则,直接返回该key对应的值
V putIfAbsent(K key, V value);
//删除与<key,value>完全匹配的Entry,并返回true;否则,返回false
boolean remove(Object key, Object value);
//如果存在key,且值和oldValue一致,则更新为newValue,并返回true;否则,返回false
boolean replace(K key, V oldValue, V newValue);
//如果存在key,则更新为value,返回旧value;否则,返回null
V replace(K key, V value);
//遍历Map的所有Entry,并对其进行指定的funtion操作
default void replaceAll(BiFunction<? super K, ? super V, ? extends V> function) {...}
//如果Map不存在指定的key,则通过mappingFunction计算出value并插入
default V computeIfAbsent(K key , Function<? super K, ? extends V> mappingFunction{...}
//如果Map存在指定的key,则通过mappingFunction计算出value并替换旧值
default V computeIfPresent(K key, BiFunction<? super K, ? super V, ? extends V> remappingFunction) {...}
//根据指定的key,查找value;然后根据得到的value和remappingFunction重新计算出新值,并替换旧值
default V compute(K key , BiFunction<? super K, ? super V, ? extends V> remappingFunction) {...}
//如果key不存在,则插入value;否则,根据key对应的值和remappingFunction计算出新值,并替换旧值
default V merge(K key, V value , BiFunction<? super V, ? super V, ? extends V> remappingFunction) {...}
而Serializable则标志这个类可以进行序列化。
数据结构
ConcurrentHashMap的数据结构对比HashMap要复杂很多,所以在看构造器之前先分析一下它的数据结构。
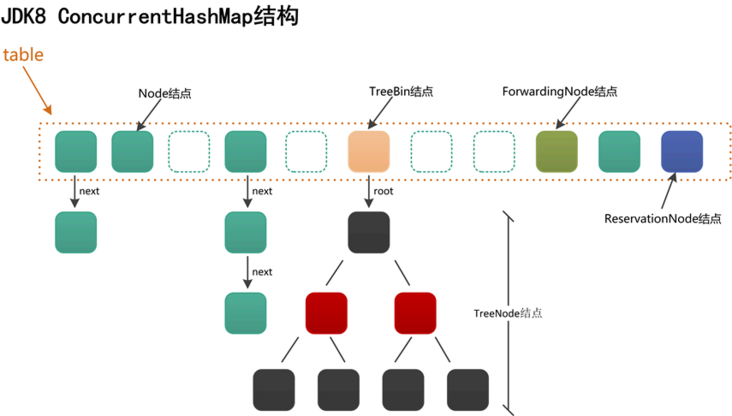
从上图可以看出,table一共包含 4 种不同类型的桶,不同的桶用不同颜色表示,分别是Node、TreeBin、ForwardingNode和ReservationNode这四种结点。
另外,TreeBin结点所连接的是一颗红黑树,红黑树结点使用TreeNode表示,加上前面四种一共是5种结点。
而这里没有直接使用TreeNode的原因是因为红黑树的操作比较复杂,包括构建、左旋、右旋、删除,平衡等操作,用一个代理结TreeBin来包含这些复杂操作,其实是一种 “职责分离”的思想,另外TreeBin中也包含了一些加/解锁操作。
Node结点
- Node是其它四种类型结点的父类;
- 默认链接到table[i],即桶上的结点就是Node结点;
- 当出现hash冲突时,Node结点会首先以链表的形式链接到table上,当超过阈值的时候才会转化为红黑树。
/**
* 普通的Entry结点, 以链表形式保存时才会使用, 存储实际的数据.
*/
static class Node<K, V> implements Map.Entry<K, V> {
final int hash; //通过key计算hash值,通过hash值找相应的桶
final K key;
volatile V val;
volatile Node<K, V> next; // 链表指针
Node(int hash, K key, V val, Node<K, V> next) {
this.hash = hash;
this.key = key;
this.val = val;
this.next = next;
}
public final K getKey() {
return key;
}
public final V getValue() {
return val;
}
public final int hashCode() {
return key.hashCode() ^ val.hashCode();
}
public final String toString() {
return key + "=" + val;
}
public final V setValue(V value) {
throw new UnsupportedOperationException();
}
public final boolean equals(Object o) {
Object k, v, u;
Map.Entry<?, ?> e;
return ((o instanceof Map.Entry) &&
(k = (e = (Map.Entry<?, ?>) o).getKey()) != null &&
(v = e.getValue()) != null &&
(k == key || k.equals(key)) &&
(v == (u = val) || v.equals(u)));
}
/**
* 链表查找.
*/
Node<K, V> find(int h, Object k) {
Node<K, V> e = this;
if (k != null) {
do {
K ek;
if (e.hash == h &&
((ek = e.key) == k || (ek != null && k.equals(ek))))
return e;
} while ((e = e.next) != null);
}
return null;
}
}
TreeNode结点
TreeNode是红黑树的结点,TreeNode不会直接链接到桶上面,而是由TreeBin链接,TreeBin会指向红黑树的根结点。
/**
* 红黑树结点, 存储实际的数据.
*/
static final class TreeNode<K, V> extends Node<K, V> {
boolean red;
TreeNode<K, V> parent;
TreeNode<K, V> left;
TreeNode<K, V> right;
/**
* prev指针是为了方便删除.
* 删除链表的非头结点时,需要知道它的前驱结点才能删除,所以直接提供一个prev指针
*/
TreeNode<K, V> prev;
TreeNode(int hash, K key, V val, Node<K, V> next,
TreeNode<K, V> parent) {
super(hash, key, val, next);
this.parent = parent;
}
Node<K, V> find(int h, Object k) {
return findTreeNode(h, k, null);
}
/**
* 以当前结点(this)为根结点,开始遍历查找指定key.
*/
final TreeNode<K, V> findTreeNode(int h, Object k, Class<?> kc) {
if (k != null) {
TreeNode<K, V> p = this;
do {
int ph, dir;
K pk;
TreeNode<K, V> q;
TreeNode<K, V> pl = p.left, pr = p.right;
if ((ph = p.hash) > h)
p = pl;
else if (ph < h)
p = pr;
else if ((pk = p.key) == k || (pk != null && k.equals(pk)))
return p;
else if (pl == null)
p = pr;
else if (pr == null)
p = pl;
else if ((kc != null ||
(kc = comparableClassFor(k)) != null) &&
(dir = compareComparables(kc, k, pk)) != 0)
p = (dir < 0) ? pl : pr;
else if ((q = pr.findTreeNode(h, k, kc)) != null)
return q;
else
p = pl;
} while (p != null);
}
return null;
}
}
TreeBin结点
TreeBin相当于TreeNode的代理结点;TreeBin会直接链接到 table[i] 上,该结点提供了一系列红黑树相关的操作,以及加锁、解锁操作。
/*
TreeNode的代理结点(相当于封装了TreeNode的容器,提供针对红黑树的转换操作和锁控制)
hash值固定为-2
*/
static final class TreeBin<K,V> extends Node<K,V> {
TreeNode<K,V> root; // 红黑树结构的根结点
volatile TreeNode<K,V> first; // 链表结构的头结点
volatile Thread waiter; // 最近的一个设置WAITER标识位的线程
volatile int lockState; // 整体的锁状态标识位,0为初始态
// values for lockState
static final int WRITER = 1; // 二进制001,红黑树的写锁状态
static final int WAITER = 2; // 二进制010,红黑树的等待获取写锁状态(优先锁,当有锁等待,读就不能增加了)
// 二进制100,红黑树的读锁状态,读可以并发,每多一个读线程,lockState都加上一个READER值,
static final int READER = 4;
/*
在hashCode相等并且不是Comparable类型时,用此方法判断大小.
*/
static int tieBreakOrder(Object a, Object b) {
int d;
if (a == null || b == null ||
(d = a.getClass().getName().
compareTo(b.getClass().getName())) == 0)
d = (System.identityHashCode(a) <= System.identityHashCode(b) ? -1 : 1);
return d;
}
// 将以b为头结点的链表转换为红黑树
TreeBin(TreeNode<K,V> b) {...}
// 通过lockState,对红黑树的根结点写锁.
private final void lockRoot() {
if (!U.compareAndSetInt(this, LOCKSTATE, 0, WRITER))
contendedLock(); // offload to separate method ,Possibly blocks awaiting root lock.
}
//释放写锁
private final void unlockRoot() { lockState = 0; }
// 从根结点开始遍历查找,找到“相等”的结点就返回它,没找到就返回null,当存在写锁时,以链表方式进行查找,后会面会介绍
final Node<K,V> find(int h, Object k) {... }
/**
* 查找指定key对应的结点,如果未找到,则直接插入.
* @return 直接插入成功返回null, 替换返回找到的结点的oldVal
*/
final TreeNode<K,V> putTreeVal(int h, K k, V v) {...}
/*
删除红黑树的结点:
1. 红黑树规模太小时,返回true,然后进行 树 -> 链表 的转化,最后删除;
2. 红黑树规模足够时,不用变换成链表,但删除结点时需要加写锁;
*/
final boolean removeTreeNode(TreeNode<K,V> p) {...}
// 以下是红黑树的经典操作方法,改编自《算法导论》
static <K,V> TreeNode<K,V> rotateLeft(TreeNode<K,V> root , TreeNode<K,V> p) { ...}
static <K,V> TreeNode<K,V> rotateRight(TreeNode<K,V> root , TreeNode<K,V> p) {...}
static <K,V> TreeNode<K,V> balanceInsertion(TreeNode<K,V> root , TreeNode<K,V> x) {...}
static <K,V> TreeNode<K,V> balanceDeletion(TreeNode<K,V> root, TreeNode<K,V> x) { ... }
static <K,V> boolean checkInvariants(TreeNode<K,V> t) {...} //递归检查红黑树的正确性
private static final long LOCKSTATE= U.objectFieldOffset(TreeBin.class, "lockState");
}
ForwardingNode结点
ForwardingNode结点仅仅在 扩容 时才会使用
/**
* ForwardingNode是一种临时结点,在扩容进行中才会出现,hash值固定为-1,且不存储实际数据。
* 如果旧table数组的一个hash桶中全部的结点都迁移到了新table中,则在这个桶中放置一个ForwardingNode,即table[i]=ForwardingNode。
* 读操作碰到ForwardingNode时,将操作转发到扩容后的新table数组上去执行;写操作碰见它时,则尝试帮助扩容。
*/
static final class ForwardingNode<K, V> extends Node<K, V> {
final Node<K, V>[] nextTable;
ForwardingNode(Node<K, V>[] tab) {
super(MOVED, null, null, null);
this.nextTable = tab;
}
// 在新的数组nextTable上进行查找
Node<K, V> find(int h, Object k) {
// loop to avoid arbitrarily deep recursion on forwarding nodes
outer:
for (Node<K, V>[] tab = nextTable; ; ) {
Node<K, V> e;
int n;
if (k == null || tab == null || (n = tab.length) == 0 ||
(e = tabAt(tab, (n - 1) & h)) == null)
return null;
for (; ; ) {
int eh;
K ek;
if ((eh = e.hash) == h &&
((ek = e.key) == k || (ek != null && k.equals(ek))))
return e;
if (eh < 0) {
if (e instanceof ForwardingNode) {
tab = ((ForwardingNode<K, V>) e).nextTable;
continue outer;
} else
return e.find(h, k);
}
if ((e = e.next) == null)
return null;
}
}
}
}
ReservationNode结点
保留结点,ConcurrentHashMap中的一些特殊方法会专门用到该类结点。
/**
* 保留结点.
* hash值固定为-3, 不保存实际数据
* 只在computeIfAbsent和compute这两个函数式API中充当占位符加锁使用
*/
static final class ReservationNode<K, V> extends Node<K, V> {
ReservationNode() {
super(RESERVED, null, null, null);
}
Node<K, V> find(int h, Object k) {
return null;
}
}
构造器方法
ConcurrentHashMap提供了五个构造器,这五个构造器内部最多也只是计算了下table的初始容量大小,并没有进行实际的创建table数组的工作。
因为ConcurrentHashMap用了一种懒加载的模式,只有到首次插入键值对的时候,才会真正的去初始化table数组。
空构造器
public ConcurrentHashMap() {
}
指定table初始容量的构造器
/**
* 指定table初始容量的构造器.
* tableSizeFor会返回大于入参(initialCapacity + (initialCapacity >>> 1) + 1)的最小2次幂值
*/
public ConcurrentHashMap(int initialCapacity) {
if (initialCapacity < 0)
throw new IllegalArgumentException();
int cap = ((initialCapacity >= (MAXIMUM_CAPACITY >>> 1)) ? MAXIMUM_CAPACITY :
tableSizeFor(initialCapacity + (initialCapacity >>> 1) + 1));
this.sizeCtl = cap;
}
根据已有的Map构造
/**
* 根据已有的Map构造ConcurrentHashMap.
*/
public ConcurrentHashMap(Map<? extends K, ? extends V> m) {
this.sizeCtl = DEFAULT_CAPACITY;
putAll(m);
}
指定table初始容量和负载因子的构造器
/**
* 指定table初始容量和负载因子的构造器.
*/
public ConcurrentHashMap(int initialCapacity, float loadFactor) {
this(initialCapacity, loadFactor, 1);
}
指定table初始容量、负载因子、并发级别的构造器
/**
* 指定table初始容量、负载因子、并发级别的构造器.
* <p>
* 注意:concurrencyLevel只是为了兼容JDK1.8以前的版本,并不是实际的并发级别,loadFactor也不是实际的负载因子
* 这两个都失去了原有的意义,仅仅对初始容量有一定的控制作用
*/
public ConcurrentHashMap(int initialCapacity, float loadFactor, int concurrencyLevel) {
if (!(loadFactor > 0.0f) || initialCapacity < 0 || concurrencyLevel <= 0)
throw new IllegalArgumentException();
if (initialCapacity < concurrencyLevel)
initialCapacity = concurrencyLevel;
long size = (long) (1.0 + (long) initialCapacity / loadFactor);
int cap = (size >= (long) MAXIMUM_CAPACITY) ?
MAXIMUM_CAPACITY : tableSizeFor((int) size);
this.sizeCtl = cap;
}
常量/字段
源码中常量如下:
/**
* 最大容量.
*/
private static final int MAXIMUM_CAPACITY = 1 << 30;
/**
* 默认初始容量
*/
private static final int DEFAULT_CAPACITY = 16;
/**
* 最大数组长度
*/
static final int MAX_ARRAY_SIZE = Integer.MAX_VALUE - 8;
/**
* 负载因子,为了兼容JDK1.8以前的版本而保留。
* JDK1.8中的ConcurrentHashMap的负载因子恒定为0.75
*/
private static final float LOAD_FACTOR = 0.75f;
/**
* 链表转树的阈值,即链接结点数大于8时, 链表转换为树.
*/
static final int TREEIFY_THRESHOLD = 8;
/**
* 树转链表的阈值,即树结点树小于6时,树转换为链表.
*/
static final int UNTREEIFY_THRESHOLD = 6;
/**
* 在链表转变成树之前,还会有一次判断:
* 即只有键值对数量大于MIN_TREEIFY_CAPACITY,才会发生转换。
* 这是为了避免在Table建立初期,多个键值对恰好被放入了同一个链表中而导致不必要的转化。
*/
static final int MIN_TREEIFY_CAPACITY = 64;
/**
* 在树转变成链表之前,还会有一次判断:
* 即只有键值对数量小于MIN_TRANSFER_STRIDE,才会发生转换.
*/
private static final int MIN_TRANSFER_STRIDE = 16;
/**
* 用于在扩容时生成唯一的随机数.
*/
private static int RESIZE_STAMP_BITS = 16;
/**
* 可同时进行扩容操作的最大线程数.
*/
private static final int MAX_RESIZERS = (1 << (32 - RESIZE_STAMP_BITS)) - 1;
/**
* The bit shift for recording size stamp in sizeCtl.
*/
private static final int RESIZE_STAMP_SHIFT = 32 - RESIZE_STAMP_BITS;
static final int MOVED = -1; // 标识ForwardingNode结点(在扩容时才会出现,不存储实际数据)
static final int TREEBIN = -2; // 标识红黑树的根结点
static final int RESERVED = -3; // 标识ReservationNode结点()
static final int HASH_BITS = 0x7fffffff; // usable bits of normal node hash
/**
* CPU核心数,扩容时使用
*/
static final int NCPU = Runtime.getRuntime().availableProcessors();
源码中字段如下:
/**
* Node数组,标识整个Map,首次插入元素时创建,大小总是2的幂次.
*/
transient volatile Node<K, V>[] table;
/**
* 扩容后的新Node数组,只有在扩容时才非空.
*/
private transient volatile Node<K, V>[] nextTable;
/**
* 控制table的初始化和扩容(重要⭐⭐⭐)
* 0 : 初始默认值
* -1 : 有线程正在进行table的初始化
* >0 : table初始化时使用的容量,或初始化/扩容完成后的threshold
* -(1 + nThreads) : 记录正在执行扩容任务的线程数
*/
private transient volatile int sizeCtl;
/**
* 扩容时需要用到的一个下标变量.
*/
private transient volatile int transferIndex;
/**
* 计数基值,当没有线程竞争时,计数将加到该变量上。类似于LongAdder的base变量
*/
private transient volatile long baseCount;
/**
* 计数数组,出现并发冲突时使用。类似于LongAdder的cells数组
*/
private transient volatile CounterCell[] counterCells;
/**
* 自旋标识位,用于CounterCell[]扩容时使用。类似于LongAdder的cellsBusy变量
*/
private transient volatile int cellsBusy;
// 视图相关字段
private transient KeySetView<K, V> keySet;
private transient ValuesView<K, V> values;
private transient EntrySetView<K, V> entrySet;
put()方法
put方法是ConcurrentHashMap类的核心方法
/**
* 插入键值对,<K,V>均不能为null.
*/
public V put(K key, V value) {
return putVal(key, value, false);
}
这里提一嘴,为什么ConcurrentHashMap和Hashtable的key和value都不允许为null,而HashMap可以呢?
这是因为ConcurrentHashMap和Hashtable都是支持并发的,这样会有一个问题,当你通过get(k)获取对应的value时,如果获取到的是null时,你无法判断,它是put(k,v)的时候value就为null,还是这个key从来没有做过映射。
而HashMap是非并发的,可以通过contains(key)来进行校验。而支持并发的Map在调用m.contains(key)和m.get(key)时m可能已经不同了。
put方法内部调用了putVal这个私有方法:
/**
* 实际的插入操作
* @param onlyIfAbsent true:仅当key不存在时,才插入
*/
final V putVal(K key, V value, boolean onlyIfAbsent) {
if (key == null || value == null) throw new NullPointerException();
int hash = spread(key.hashCode()); // 再次计算hash值
/**
* 使用链表保存时,binCount记录table[i]这个桶中所保存的结点数;
* 使用红黑树保存时,binCount==2,保证put后更改计数值时能够进行扩容检查,同时不触发红黑树化操作
*/
int binCount = 0;
for (Node<K, V>[] tab = table; ; ) { // 自旋插入结点,直到成功
Node<K, V> f;
int n, i, fh;
if (tab == null || (n = tab.length) == 0) // CASE1: 首次初始化table —— 懒加载
tab = initTable();
else if ((f = tabAt(tab, i = (n - 1) & hash)) == null) { // CASE2: table[i]对应的桶为null
// 注意下上面table[i]的索引i的计算方式:[ key的hash值 & (table.length-1) ]
// 这也是table容量必须为2的幂次的原因,读者可以自己看下当table.length为2的幂次时,(table.length-1)的二进制形式的特点 —— 全是1
// 配合这种索引计算方式可以实现key的均匀分布,减少hash冲突
if (casTabAt(tab, i, null, new Node<K, V>(hash, key, value, null))) // 插入一个链表结点
break;
} else if ((fh = f.hash) == MOVED) // CASE3: 发现ForwardingNode结点,说明此时table正在扩容,则尝试协助数据迁移
tab = helpTransfer(tab, f);
else { // CASE4: 出现hash冲突,也就是table[i]桶中已经有了结点
V oldVal = null;
synchronized (f) { // 锁住table[i]结点
if (tabAt(tab, i) == f) { // 再判断一下table[i]是不是第一个结点, 防止其它线程的写修改
if (fh >= 0) { // CASE4.1: table[i]是链表结点
binCount = 1;
for (Node<K, V> e = f; ; ++binCount) {
K ek;
// 找到“相等”的结点,判断是否需要更新value值
if (e.hash == hash && ((ek = e.key) == key || (ek != null && key.equals(ek)))) {
oldVal = e.val;
if (!onlyIfAbsent)
e.val = value;
break;
}
Node<K, V> pred = e;
if ((e = e.next) == null) { // “尾插法”插入新结点
pred.next = new Node<K, V>(hash, key,
value, null);
break;
}
}
} else if (f instanceof TreeBin) { // CASE4.2: table[i]是红黑树结点
Node<K, V> p;
binCount = 2;
if ((p = ((TreeBin<K, V>) f).putTreeVal(hash, key, value)) != null) {
oldVal = p.val;
if (!onlyIfAbsent)
p.val = value;
}
}
}
}
if (binCount != 0) {
if (binCount >= TREEIFY_THRESHOLD)
treeifyBin(tab, i); // 链表 -> 红黑树 转换
if (oldVal != null) // 表明本次put操作只是替换了旧值,不用更改计数值
return oldVal;
break;
}
}
}
addCount(1L, binCount); // 计数值加1
return null;
}
putVal这个方法逻辑大概如下:
- 首先根据key计算hash值
(n - 1) & hash; - 然后通过hash值与table容量进行运行,计算得到key映射到table上的索引;
- 最后加入结点,这里要略微复杂一些。
putVal()中的四种情况
1.首次初始化table —— 懒加载
之前分析构造器的时候以及put()源码的注释中都说了,ConcurrentHashMap在构造的时候并不会始化table数组,首次初始化就在这里通过 initTable() 完成。
在分析initTable()的源码前,我们需要考虑一个问题,如果多个线程同时调用initTable()初始化Node数组怎么办?要如何去选择哪个线程去初始化?
实际上,在初始化数组时使用了乐观锁CAS操作来决定到底是哪个线程有资格进行初始化。volatile变量(sizeCtl):它是一个标记位,用来告诉其他线程这个坑位有没有人在,其线程间的可见性由volatile保证,CAS操作保证了设置sizeCtl标记位的可见性,保证了只有一个线程能设置成功。
/**
* 初始化table, 使用sizeCtl作为初始化容量.
*/
private final Node<K, V>[] initTable() {
Node<K, V>[] tab;
int sc;
while ((tab = table) == null || tab.length == 0) { //自旋直到初始化成功
if ((sc = sizeCtl) < 0) // sizeCtl<0 说明table已经正在初始化/扩容,此时会让出CPU时间片
Thread.yield();
else if (U.compareAndSwapInt(this, SIZECTL, sc, -1)) { // 将sizeCtl更新成-1,表示正在初始化中,如果CAS操作成功了,代表本线程将负责初始化工作
try {
if ((tab = table) == null || tab.length == 0) {
int n = (sc > 0) ? sc : DEFAULT_CAPACITY;
Node<K, V>[] nt = (Node<K, V>[]) new Node<?, ?>[n];
table = tab = nt;
sc = n - (n >>> 2); // n - (n >>> 2) = n - n/4 = 0.75n, 前面说了loadFactor已在JDK1.8废弃
}
} finally {
sizeCtl = sc; // 设置threshold = 0.75 * table.length
}
break;
}
}
return tab;
}
2.table[i]对应的桶为空: 直接CAS操作占用桶table[i];
3.发现ForwardingNode结点,说明此时table正在扩容,则尝试协助进行数据迁移。后面会对helpTransfer()调用的核心方法transfer()进行分析,我这里简单了解一下helpTransfer():
final Node<K,V>[] helpTransfer(Node<K,V>[] tab, Node<K,V> f) {
Node<K,V>[] nextTab; int sc;
if (tab != null && (f instanceof ForwardingNode) &&
(nextTab = ((ForwardingNode<K,V>)f).nextTable) != null) {
int rs = resizeStamp(tab.length);
while (nextTab == nextTable && table == tab && (sc = sizeCtl) < 0) {
if ((sc >>> RESIZE_STAMP_SHIFT) != rs || sc == rs + 1 || sc == rs + MAX_RESIZERS || transferIndex <= 0)
break;
if (U.compareAndSwapInt(this, SIZECTL, sc, sc + 1)) { //sizeCtl加一,表示多一个线程进来协助扩容
transfer(tab, nextTab); //扩容,后面详细讲解
break;
}
}
return nextTab;
}
return table;
}
4.出现hash冲突,也就是table[i]桶中已经有了结点
- 当两个不同key映射到同一个 table[i] 桶中时,就会出现这种情况:
- 当table[i]的结点类型为Node——链表结点时,就会将新结点以“尾插法”的形式插入链表的尾部;
- 当table[i]的结点类型为TreeBin——红黑树代理结点时,就会将新结点通过红黑树的插入方式插入。
get()方法
/**
* 根据key查找对应的value值
*
* @return 查找不到则返回null
* @throws NullPointerException if the specified key is null
*/
public V get(Object key) {
Node<K, V>[] tab;
Node<K, V> e, p;
int n, eh;
K ek;
int h = spread(key.hashCode()); // 重新计算key的hash值
if ((tab = table) != null && (n = tab.length) > 0 &&
(e = tabAt(tab, (n - 1) & h)) != null) {
if ((eh = e.hash) == h) { // table[i]就是待查找的项,直接返回
if ((ek = e.key) == key || (ek != null && key.equals(ek)))
return e.val;
} else if (eh < 0) // hash值<0, 说明遇到特殊结点(非链表结点), 调用find方法查找
return (p = e.find(h, key)) != null ? p.val : null;
while ((e = e.next) != null) { // 按链表方式查找
if (e.hash == h &&
((ek = e.key) == key || (ek != null && key.equals(ek))))
return e.val;
}
}
return null;
}
查找流程大致如下:
- 首先:根据key的hash值计算映射到table的哪个桶,table[i];
- 其次:如果table[i]的key和待查找key相同,那直接返回(这时候不用判断是不是特殊节点);
- 最后:如果table[i]对应的结点是特殊结点(hash值小于0),则通过 find() 查找,如果不是特殊节点,则按链表查找;
注意,假设现在需要get一个下标为3的结点,但此时桶table[3]的节点正在迁移,突然有一个线程进来调用get方法,正好key又散列到桶table[3],此时怎么办?
此时使用的查询方法就不是get()了,而是find()。
find()方法
- Node结点的查找(hash>=0)
当槽table[i]被普通Node结点占用,说明是链表链接的形式,直接从链表头开始查找:
/**
* 链表查找.
*/
Node<K, V> find(int h, Object k) {
Node<K, V> e = this;
if (k != null) {
do {
K ek;
if (e.hash == h && ((ek = e.key) == k || (ek != null && k.equals(ek))))
return e;
} while ((e = e.next) != null);
}
return null;
}
- TreeBin结点的查找 (hash=-2)
TreeBin的查找比较特殊,我们知道当桶table[i]被TreeBin结点占用时,说明链接的是一棵红黑树,并且由于红黑树的插入、删除等操作会涉及整个结构的调整,所以通常存在读写并发操作的时候,是需要加锁的。
/**
* 从根结点开始遍历查找,找到“相等”的结点就返回它,没找到就返回null
* 当存在写锁或等待获取写锁时,以链表方式进行查找
* 也就是说,只有读锁时,才红黑树查找
*/
final Node<K, V> find(int h, Object k) {
if (k != null) {
for (Node<K, V> e = first; e != null; ) {
int s;
K ek;
/**
* 两种特殊情况下以链表的方式进行查找:
* 1. WRITER---》有线程正持有写锁,这样做能够不阻塞读线程
* 2. WAITER ---》有线程等待获取写锁,不再继续加读锁,相当于“写优先”模式
*/
if (((s = lockState) & (WAITER | WRITER)) != 0) {
if (e.hash == h && ((ek = e.key) == k || (ek != null && k.equals(ek))))
return e;
e = e.next; // 链表形式查找,找到立即返回
}
//这时候就是按红黑树找了,读线程数量加1(读读),读状态进行累加, READER==4
else if (U.compareAndSwapInt(this, LOCKSTATE, s, s + READER)) {
TreeNode<K, V> r, p;
try {
p = ((r = root) == null ? null : r.findTreeNode(h, k, null)); //红黑树的根节点非空才能找
} finally {
Thread w;
// 如果去除当前读线程状态,LOCKSTATE依旧表示为有写线程w因为读锁而阻塞并有读线程,则告诉写线程,它可以尝试获取写锁了,就是条件2
if (U.getAndAddInt(this, LOCKSTATE, -READER) == (READER | WAITER) && (w = waiter) != null)
LockSupport.unpark(w);
}
return p;
}
}
}
return null;
}
- ForwardingNode结点的查找 (hash=-1)
ForwardingNode是一种临时结点,在扩容进行中才会出现,所以查找也在扩容的table —-》nextTable 上进行 (链表遍历)。
/**
* 在新的扩容table—-》nextTable上进行查找
*/
Node<K, V> find(int h, Object k) {
// loop to avoid arbitrarily deep recursion on forwarding nodes
outer:
for (Node<K, V>[] tab = nextTable; ; ) {
Node<K, V> e;
int n;
if (k == null || tab == null || (n = tab.length) == 0 || (e = tabAt(tab, (n - 1) & h)) == null)
return null;
for (; ; ) {
int eh;
K ek;
if ((eh = e.hash) == h && ((ek = e.key) == k || (ek != null && k.equals(ek))))
return e;
if (eh < 0) {
if (e instanceof ForwardingNode) {
tab = ((ForwardingNode<K, V>) e).nextTable;
continue outer;
} else
return e.find(h, k); //链表遍历
}
if ((e = e.next) == null)
return null;
}
}
}
- ReservationNode结点的查找
ReservationNode是保留结点,不保存实际数据,所以直接返回null
Node<K, V> find(int h, Object k) {
return null;
}
计数方法
ConcurrentHashMap由于存在多线程的情况,所以其相关的计数方法也需要进行特殊处理。
ConcurrentHashMap中使用size()方法计算键值对的数目:
public int size() {
long n = sumCount();
return ((n < 0L) ? 0 : (n > (long)Integer.MAX_VALUE) ? Integer.MAX_VALUE : (int)n);
}
sumCount()的源码:
final long sumCount() {
CounterCell[] as = counterCells;
CounterCell a;
long sum = baseCount; //基础值
if (as != null) {
for (int i = 0; i < as.length; ++i) {
if ((a = as[i]) != null)
sum += a.value;
}
}
return sum;
}
CounterCell 这个槽对象,当出现并发冲突时,每个线程会根据自己的hash值找到对应的槽位置。
/**
* 计数槽.
* 类似于LongAdder中的Cell内部类
*/
static final class CounterCell {
volatile long value;
CounterCell(long x) {
value = x;
}
}
之前在putVal()方法中,添加新结点后会使用addCount()进行技术加1,源码如下:
/**
* 更改计数值,并检查长度是否达到阈值
*/
private final void addCount(long x, int check) {
CounterCell[] as; //计数桶
long b, s;
// !U.compareAndSwapLong(this, BASECOUNT, b = baseCount, s = b + x):尝试更新baseCount
//1、如果counterCells不为null,则代表已经初始化了,直接进入if语句块
//2、若竞争不严重,counterCells有可能还未初始化,为null,先尝试CAS操作递增baseCount值
if ((as = counterCells) != null ||!U.compareAndSwapLong(this, BASECOUNT, b = baseCount, s = b + x)) {
//进入此语句块有两种可能:
//1.counterCells被初始化完成了,不为null
//2.CAS操作递增baseCount值失败了,说明出现并发冲突,则将计数值累加到Cell槽
CounterCell a;
long v;
int m;
boolean uncontended = true; //标志是否存在竞争
//1.先判断计数桶是否初始化,如果as=null,说明没有,进入语句块
//2.判断计数桶长度是否为空,若是进入语句块
//3.这里做了一个线程变量随机数,若桶的这个位置为空,进入语句块(根据线程hash值计算槽索引)
//4.到这里说明桶已经初始化了,且随机的这个位置不为空,尝试CAS操作使桶加1,失败进入语句块
if (as == null || (m = as.length - 1) < 0 ||
(a = as[ThreadLocalRandom.getProbe() & m]) == null ||
!(uncontended = U.compareAndSwapLong(a, CELLVALUE, v = a.value, v + x))) {
fullAddCount(x, uncontended); // 槽更新也失败, 则会执行fullAddCount
return;
}
if (check <= 1)
return;
s = sumCount();
}
if (check >= 0) { // 检测是否扩容
Node<K, V>[] tab, nt;
int n, sc;
while (s >= (long) (sc = sizeCtl) && (tab = table) != null && (n = tab.length) < MAXIMUM_CAPACITY) {
int rs = resizeStamp(n);
if (sc < 0) {
if ((sc >>> RESIZE_STAMP_SHIFT) != rs || sc == rs + 1 ||
sc == rs + MAX_RESIZERS || (nt = nextTable) == null ||
transferIndex <= 0)
break;
if (U.compareAndSwapInt(this, SIZECTL, sc, sc + 1))
transfer(tab, nt);
} else if (U.compareAndSwapInt(this, SIZECTL, sc, (rs << RESIZE_STAMP_SHIFT) + 2))
transfer(tab, null);
s = sumCount(); //统计容器大小
}
}
}
当出现了并发冲突,则不会再用CAS方式来计数了,直接使用桶方式,从上面的addCount方法可以看出来,此时的countCell是为空的(或者不为空但CAS更新失败),最终一定会进入fullAddCount方法来进行初始化桶。
private final void fullAddCount(long x, boolean wasUncontended) {
int h;
if ((h = ThreadLocalRandom.getProbe()) == 0) {
ThreadLocalRandom.localInit(); // force initialization
h = ThreadLocalRandom.getProbe();
wasUncontended = true;
}
boolean collide = false; // True if last slot nonempty
for (;;) {
CounterCell[] as; CounterCell a; int n; long v;
...
//如果计数桶!=null,证明已经初始化,此时不走此语句块
if ((as = counterCells) != null && (n = as.length) > 0) {
...
}
//进入此语句块进行计数桶的初始化
//CAS设置cellsBusy=1,表示现在计数桶Busy中...
else if (cellsBusy == 0 && counterCells == as &&
U.compareAndSwapInt(this, CELLSBUSY, 0, 1)) {
//若有线程同时初始化计数桶,由于CAS操作只有一个线程进入这里
boolean init = false;
try { // Initialize table
//再次确认计数桶为空
if (counterCells == as) {
//初始化一个长度为2的计数桶
CounterCell[] rs = new CounterCell[2];
//h为一个随机数,与上1则代表结果为0、1中随机的一个
//也就是在0、1下标中随便选一个计数桶,x=1,放入1的值代表增加1个容量
rs[h & 1] = new CounterCell(x);
//将初始化好的计数桶赋值给ConcurrentHashMap
counterCells = rs;
init = true;
}
} finally {
//最后将busy标识设置为0,表示不busy了
cellsBusy = 0;
}
if (init)
break;
}
//若有线程同时来初始化计数桶,则没有抢到busy资格的线程就先来CAS递增baseCount
else if (U.compareAndSwapLong(this, BASECOUNT, v = baseCount, v + x))
break; // Fall back on using base
}
}
从上面源码中可以看出,在CAS操作递增计数桶失败了3次之后,会进行扩容计数桶操作,注意此时同时进行了两次随机定位计数桶来进行CAS递增的,所以此时可以保证大概率是因为计数桶不够用了,才会进行计数桶扩容。
计数总结
- 1、利用CAS递增
baseCount值来感知是否存在线程竞争,若竞争不大直接CAS递增baseCount值即可,性能与直接baseCount++差别不大; - 2、若存在线程竞争,则初始化计数桶,若此时初始化计数桶的过程中也存在竞争,多个线程同时初始化计数桶,则没有抢到初始化资格的线程直接尝试
CAS递增baseCount值的方式完成计数,最大化利用了线程的并行。此时使用计数桶计数,分而治之的方式来计数,此时两个计数桶最大可提供两个线程同时计数,同时使用CAS操作来感知线程竞争,若两个桶情况下CAS操作还是频繁失败(失败3次),则直接扩容计数桶,变为4个计数桶,支持最大同时4个线程并发计数,以此类推…同时使用位运算和随机数的方式”负载均衡”一样的将线程计数请求接近均匀的落在各个计数桶中。
扩容机制
通过前面相关介绍,我们知道,当往table[i]中插入结点时,如果链表的结点数目超过一定阈值(8),就会触发链表 -> 红黑树的转换,这样提高了查找效率。
if (binCount >= TREEIFY_THRESHOLD)
treeifyBin(tab, i); // 链表 -> 红黑树 转换
接下来我们分析这个 链表 -> 红黑树 的转换操作,treeifyBin(tab, i)。
/*
* 链表 -> 红黑树 转换
*/
private final void treeifyBin(Node<K,V>[] tab, int index) {
Node<K,V> b; int n;
if (tab != null) {
// CASE 1: table的容量 < MIN_TREEIFY_CAPACITY时,直接进行table扩容,不进行红黑树转换,MIN_TREEIFY_CAPACITY默认为64
if ((n = tab.length) < MIN_TREEIFY_CAPACITY)
tryPresize(n << 1);
// CASE 2: table的容量 ≥ MIN_TREEIFY_CAPACITY时,进行相应桶的链表 -> 红黑树的转换
else if ((b = tabAt(tab, index)) != null && b.hash >= 0) {
synchronized (b) { //同步,对相应的桶的对象加锁
if (tabAt(tab, index) == b) {
TreeNode<K,V> hd = null, tl = null;
//遍历链表,建立红黑树
for (Node<K,V> e = b; e != null; e = e.next) {
TreeNode<K,V> p = new TreeNode<K,V>(e.hash, e.key, e.val, null, null);//结点类型转换
if ((p.prev = tl) == null)
hd = p;
else
tl.next = p;
tl = p;
}
// 以TreeBin类型包装,并链接到table[index]中
setTabAt(tab, index, new TreeBin<K,V>(hd));
}
}
}
}
}
通过 treeifyBin(Node<K,V>[] tab, int index) 源码可以看出,链表 -> 红黑树这一转换并不是一定会进行的:
- 当桶的容量 < MIN_TREEIFY_CAPACITY(64),CurrentHashMap 会首先选择扩容(调用 tryPresize() 把数组长度扩大到原来的两倍),而非立即转成红黑树;
- 当桶的容量 >= MIN_TREEIFY_CAPACITY(64),则选择 链表 -> 红黑树。
再看一下 tryPresize() 如何执行扩容:
/*
* 尝试对table数组进行扩容
* @param 待扩容的大小
*/
private final void tryPresize(int size) { //jdk16
// 视情况将size调整为2的整数次幂,与0.5 * MAXIMUM_CAPACITY来比较 , tableSizeFor求二次幂
int c = (size >= (MAXIMUM_CAPACITY >>> 1)) ? MAXIMUM_CAPACITY : tableSizeFor(size + (size >>> 1) + 1);
int sc;
while ((sc = sizeCtl) >= 0) {
Node<K,V>[] tab = table; int n;
//CASE 1: table还未初始化,则先进行初始化
if (tab == null || (n = tab.length) == 0) {
n = (sc > c) ? sc : c; //取最大值
if (U.compareAndSetInt(this, SIZECTL, sc, -1)) {
try {
if (table == tab) {
@SuppressWarnings("unchecked")
Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n];
table = nt;
sc = n - (n >>> 2);
}
} finally {
sizeCtl = sc;
}
}
}
// CASE2: c <= sc说明已经被扩容过了;n >= MAXIMUM_CAPACITY说明table数组已达到最大容量
else if (c <= sc || n >= MAXIMUM_CAPACITY)
break;
// CASE3: 进行table扩容
else if (tab == table) {
int rs = resizeStamp(n);
// 这个CAS操作可以保证,仅有一个线程会执行扩容
if (U.compareAndSetInt(this , SIZECTL , sc , (rs << RESIZE_STAMP_SHIFT) + 2))
transfer(tab, null);
}
}
}
扩容原理
通过tryPresize() 我们发现调用了transfer方法,该方法可以被多个线程同时调用,是“数据迁移”的核心操作方法, 接下来我们看一看
/**
* 数据转移和扩容.
* 每个调用tranfer的线程会对当前旧table中[transferIndex-stride, transferIndex-1]位置的结点进行迁移
*
* @param tab 旧table数组
* @param nextTab 新table数组
*/
private final void transfer(Node<K,V>[] tab, Node<K,V>[] nextTab) {
int n = tab.length, stride;
// stride可理解成“步长”,即“数据迁移”时,每个线程要负责旧table中的多少个桶,根据几核的CPU决定“步长”,最少16
if ((stride = (NCPU > 1) ? (n >>> 3) / NCPU : n) < MIN_TRANSFER_STRIDE) //MIN_TRANSFER_STRIDE默认16
stride = MIN_TRANSFER_STRIDE; // subdivide range
if (nextTab == null) { // 第二个参数,nextable为null说明第一次扩容
try {
@SuppressWarnings("unchecked")
// 创建新table数组,扩大一倍,32,n还为16
Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n << 1];
nextTab = nt;
} catch (Throwable ex) { // 处理内存溢出(OOME)的情况
sizeCtl = Integer.MAX_VALUE; //将表示容量的sizeCtl 设置为最大值,然后返回
return;
}
nextTable = nextTab; //设置nextTable变量为扩容后的数组
transferIndex = n; // [transferIndex-stride, transferIndex-1]:表示当前线程要进行数据迁移的桶区间
}
int nextn = nextTab.length;
// ForwardingNode结点,当旧table的某个桶中的所有结点都迁移完后,用该结点占据这个桶
ForwardingNode<K,V> fwd = new ForwardingNode<K,V>(nextTab);
// 标识一个桶的迁移工作是否完成,advance == true 表示可以进行下一个位置的迁移
boolean advance = true;
// 最后一个数据迁移的线程将该值置为true,并进行本轮扩容的收尾工作
boolean finishing = false; // to ensure sweep before committing nextTab
// i标识桶索引, bound标识边界
for (int i = 0, bound = 0;;) {
Node<K,V> f; int fh;
// 每一次自旋前的预处理,主要是为了定位本轮处理的桶区间
// 正常情况下,预处理完成后:i == transferIndex-1:右边界;bound == transferIndex-stride:左边界
while (advance) {
int nextIndex, nextBound;
if (--i >= bound || finishing)
advance = false;
else if ((nextIndex = transferIndex) <= 0) {
i = -1;
advance = false;
}
else if (U.compareAndSetInt(this, TRANSFERINDEX, nextIndex, nextBound = (nextIndex > stride ?
nextIndex - stride : 0))) {
bound = nextBound;
i = nextIndex - 1;
advance = false;
}
}
// CASE1:当前是处理最后一个tranfer任务的线程或出现扩容冲突
if (i < 0 || i >= n || i + n >= nextn) {
int sc;
if (finishing) { // 所有桶迁移均已完成
nextTable = null;
table = nextTab;
sizeCtl = (n << 1) - (n >>> 1);
return;
}
// 扩容线程数减1,表示当前线程已完成自己的transfer任务
if (U.compareAndSetInt(this, SIZECTL, sc = sizeCtl, sc - 1)) {
// 判断当前线程是否是本轮扩容中的最后一个线程,如果不是,则直接退出
if ((sc - 2) != resizeStamp(n) << RESIZE_STAMP_SHIFT)
return;
finishing = advance = true;
/**
* 最后一个数据迁移线程要重新检查一次旧table中的所有桶,看是否都被正确迁移到新table了:
* ①正常情况下,重新检查时,旧table的所有桶都应该是ForwardingNode;
* ②特殊情况下,比如扩容冲突(多个线程申请到了同一个transfer任务),此时当前线程领取的任务会作废,那么最后检查时,
* 还要处理因为作废而没有被迁移的桶,把它们正确迁移到新table中
*/
i = n; // recheck before commit
}
}
// CASE2:旧桶本身为null,不用迁移,直接尝试放一个ForwardingNode
else if ((f = tabAt(tab, i)) == null)
advance = casTabAt(tab, i, null, fwd);
// CASE3:该旧桶已经迁移完成,直接跳过
else if ((fh = f.hash) == MOVED)
advance = true; // already processed
// CASE4:该旧桶未迁移完成,进行数据迁移
else {
synchronized (f) {
if (tabAt(tab, i) == f) {
Node<K,V> ln, hn;
// CASE4.1:桶的hash>0,说明是链表迁移
if (fh >= 0) {
/**
* 下面的过程会将旧桶中的链表分成两部分:ln链和hn链
* ln链会插入到新table的槽i中,hn链会插入到新table的槽i+n中
*/
int runBit = fh & n; // 由于n是2的幂次,所以runBit要么是0,要么高位是1
Node<K,V> lastRun = f; // lastRun指向最后一个相邻runBit不同的结点
for (Node<K,V> p = f.next; p != null; p = p.next) {
int b = p.hash & n;
if (b != runBit) {
runBit = b;
lastRun = p;
}
}
if (runBit == 0) {
ln = lastRun;
hn = null;
}
else {
hn = lastRun;
ln = null;
}
// 以lastRun所指向的结点为分界,将链表拆成2个子链表ln、hn
for (Node<K,V> p = f; p != lastRun; p = p.next) {
int ph = p.hash; K pk = p.key; V pv = p.val;
if ((ph & n) == 0)
ln = new Node<K,V>(ph, pk, pv, ln);
else
hn = new Node<K,V>(ph, pk, pv, hn);
}
setTabAt(nextTab, i, ln); // ln链表存入新桶的索引i位置
setTabAt(nextTab, i + n, hn); // hn链表存入新桶的索引i+n位置
setTabAt(tab, i, fwd); // 设置ForwardingNode占位
advance = true; // 表示当前旧桶的结点已迁移完毕
}
// CASE4.2:红黑树迁移
else if (f instanceof TreeBin) {
/**
* 下面的过程会先以链表方式遍历,复制所有结点,然后根据高低位组装成两个链表;
* 然后看下是否需要进行红黑树转换,最后放到新table对应的桶中
*/
TreeBin<K,V> t = (TreeBin<K,V>)f;
TreeNode<K,V> lo = null, loTail = null;
TreeNode<K,V> hi = null, hiTail = null;
int lc = 0, hc = 0;
for (Node<K,V> e = t.first; e != null; e = e.next) {
int h = e.hash;
TreeNode<K,V> p = new TreeNode<K,V>
(h, e.key, e.val, null, null);
if ((h & n) == 0) {
if ((p.prev = loTail) == null)
lo = p;
else
loTail.next = p;
loTail = p;
++lc;
}
else {
if ((p.prev = hiTail) == null)
hi = p;
else
hiTail.next = p;
hiTail = p;
++hc;
}
}
// 判断是否需要进行 红黑树 <-> 链表 的转换
ln = (lc <= UNTREEIFY_THRESHOLD) ? untreeify(lo) :
(hc != 0) ? new TreeBin<K,V>(lo) : t;
hn = (hc <= UNTREEIFY_THRESHOLD) ? untreeify(hi) :
(lc != 0) ? new TreeBin<K,V>(hi) : t;
setTabAt(nextTab, i, ln);
setTabAt(nextTab, i + n, hn);
setTabAt(tab, i, fwd); // 设置ForwardingNode占位
advance = true; // 表示当前旧桶的结点已迁移完毕
}
else if (f instanceof ReservationNode) //jdk16特有,1.8没有
throw new IllegalStateException("Recursive update");
}
}
}
}
}
至此,ConcurrentHashMap的大体源码就分析完毕啦!
来源链接:https://www.cnblogs.com/lemondu/p/18589434
如有侵犯您的版权,请及时联系3500663466#qq.com(#换@),我们将第一时间删除本站数据。








暂无评论内容