
在多线程世界中,并发编程如同协调多个独立工作的“工人”共同完成任务——他们可能各自为政、信息不通,甚至互相干扰。本文从现实类比出发,逐层解析并发编程的三大核心难点(顺序性、可见性、原子性),并揭秘 Java 如何通过硬件指令、JVM 机制和 SDK 工具实现高效并发控制。
一、并发难点:多线程世界的“协作困境”
1. 顺序性:任务执行的“先后秩序”
问题本质:多个线程(CPU)独立执行,指令执行顺序可能与代码逻辑不一致。
- 现实类比:你负责买菜(线程A),妻子负责做饭(线程B)。若你还没买完菜(线程A未完成),妻子就开始做饭(线程B提前执行),最终会因食材缺失失败。
- 技术本质:CPU 流水线优化、编译器重排序可能打乱指令执行顺序,导致依赖关系失效。
现实解决方案:等待通知机制(妻子等你买菜完成后收到通知再做饭)。
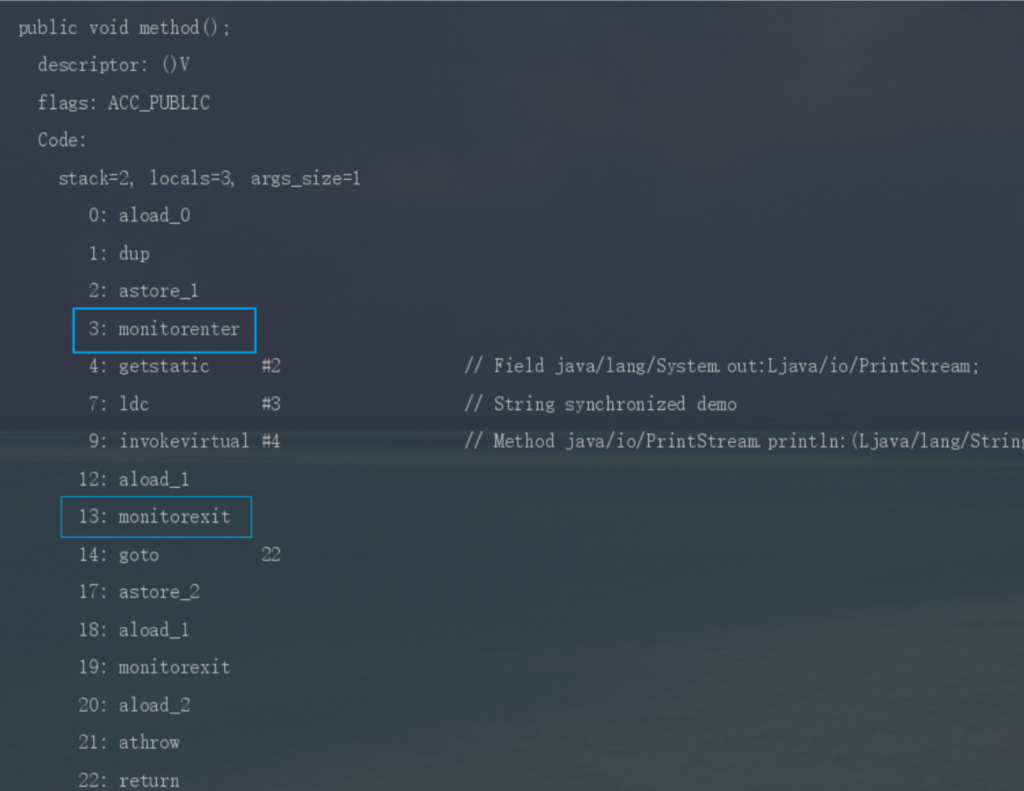
技术映射:通过锁、信号量等确保线程按顺序执行,如 synchronized 临界区、CountDownLatch 倒计时。
2. 可见性:数据变更的“信息差”
问题本质:CPU 缓存和写缓冲区导致线程间数据不同步。
- 现实类比:妻子发短信让你和弟弟买白菜(初始值),中途改买黄瓜(共享变量变更)。若你们未实时查看短信(未刷新缓存),仍按旧指令行动,导致买错。
- 技术本质:每个 CPU 有独立缓存,修改后未及时同步到主存,其他 CPU 仍读取旧值。
现实解决方案:实时通讯(妻子修改后群发短信,你们每次采购前检查最新指令)。
技术映射:
- 缓存一致性协议(MESI):CPU 间通过总线广播缓存失效通知,强制重新加载主存数据。
- volatile 关键字:通过
lock指令强制刷新缓存,确保数据可见。
3. 原子性:操作完整性的“保护罩”
问题本质:多线程交叉执行导致操作被中断,出现“半完成”状态。
- 现实类比:妻子做好饭菜(数据写入),中途被儿子吐口水(其他线程干扰),导致饭菜不可用(数据损坏)。
- 技术本质:如
i++实际包含“读-改-写”三步,可能被其他线程打断,导致结果错误。
现实解决方案:细粒度锁(只锁饭菜橱柜,而非整个厨房)。
技术映射:
- 硬件级原子指令(cmpxchg):CPU 保证“比较并交换”操作不可分割。
- 软件锁(synchronized/CAS):通过互斥或无锁机制确保操作完整性。
二、解决方法:从现实到技术的“映射工具箱”
1. 锁机制:资源独占的“门卫”
核心思想:多个线程竞争公共资源时,通过加锁确保同一时刻只有一个线程访问。
- 锁的粒度:
- 粗粒度锁(总线锁):锁定整个总线,所有 CPU 阻塞(如早期 CPU 的
lock指令锁定总线)。 - 细粒度锁(缓存锁):仅锁定目标缓存行(现代 CPU 优化),最小化竞争范围。
- 粗粒度锁(总线锁):锁定整个总线,所有 CPU 阻塞(如早期 CPU 的
- 现实类比:公共卫生间门锁(一次仅一人使用)vs 商场大门(锁粒度太大,影响整体)。
Java 实现:
- JVM 级锁(synchronized):通过对象头 MarkWord 实现锁升级(偏向锁→轻量级锁→重量级锁)。
- SDK 级锁(ReentrantLock):基于 AQS 实现可重入、可公平/非公平的显式锁。
2. CAS(比较并交换):无锁编程的“乐观策略”
核心逻辑:
- 读取当前值(V)和期望值(A);
- 若 V == A,则写入新值(B);否则重试。
- 现实类比:喂孩子喝奶前先确认“是否还饿”(比较状态),若已饱(状态变化)则放弃喂食(避免操作冗余)。
优点:无锁化操作,避免线程阻塞,适合读多写少场景(如原子类 AtomicInteger)。
缺点:
- ABA 问题:值从 A→B→A 时 CAS 误判,需用
AtomicStampedReference加版本号解决。 - 自旋开销:竞争激烈时 CPU 空转,需结合自适应自旋优化。
3. 等待通知机制:线程间的“协作枢纽”
核心组件:
- 队列:存放等待资源的线程(如 AQS 的双向链表)。
- 唤醒策略:
- 被动等待(synchronized + wait/notify):线程进入阻塞,由 JVM 唤醒(如银行叫号排队)。
- 主动等待(LockSupport.park/unpark):线程主动检查条件,避免虚假唤醒(如等待运钞车时主动确认状态)。
现实类比:
- 被动:取号排队,听到广播后前往柜台(
Object.wait()+notify())。 - 主动:定期查看银行公告屏,确认现金到账后再办理(自旋 + CAS)。
4. 缓存失效:数据同步的“广播系统”
底层实现:
- MESI 协议:CPU 通过总线监听机制,发现其他 CPU 修改缓存行时标记本地缓存失效(如妻子群发“改买黄瓜”通知)。
- volatile 语义:写操作时触发
lock指令,强制刷回主存并广播失效;读操作时检测缓存失效,重新加载主存数据。
分布式映射:
- 微服务场景中,通过 MQ 发布缓存失效通知(如 Redis 失效事件),类似 CPU 总线广播机制。
三、从硬件到 Java 的“层层实现”
1. CPU 层面:硬件级并发基石
- cmpxchg 指令:原子化“比较并交换”,是 CAS 的底层实现(如
Unsafe.compareAndSwapInt)。 - lock 指令前缀:锁定缓存行,确保可见性和有序性(volatile 写操作的核心支撑)。
- MESI 协议:通过缓存行状态(Modified, Exclusive, Shared, Invalid)实现缓存一致性。
2. JVM 层面:语言级抽象封装
- synchronized:
- 基于对象头 MarkWord 实现锁状态切换(偏向锁→轻量级锁→重量级锁)。
- 临界区退出时隐式添加内存屏障,保证可见性(刷回主存)。
- ThreadLocal:
- 为每个线程创建独立副本(存储在
Thread.threadLocals中),避免共享冲突(如每个线程独立的数据库连接)。
- 为每个线程创建独立副本(存储在
3. JDK 层面:工具类的“高效封装”
- AQS(AbstractQueuedSynchronizer):
- 核心组件:
volatile int state(状态变量)+ 双向链表(等待队列)。 - 独占锁(ReentrantLock):通过
state记录重入次数,公平/非公平通过是否检查前驱节点实现。 - 共享锁(Semaphore/CountDownLatch):
state表示剩余可用资源数,允许多线程同时获取。
- 核心组件:
- 原子类(AtomicXXX):
- 基于
Unsafe的 CAS 操作,实现单变量原子更新(如AtomicReference封装对象引用)。
- 基于
4. 编程范式:等待通知的“标准模板”
// 等待方:获取锁→检查条件→不满足则等待
synchronized (lock) {
while (conditionNotMet()) {
lock.wait(); // 释放锁,进入等待队列
}
doAction();
}
// 通知方:获取锁→修改条件→通知等待线程
synchronized (lock) {
changeCondition();
lock.notifyAll(); // 唤醒等待队列中的线程
}
注意:使用 while 而非 if 处理虚假唤醒(JVM 可能无通知唤醒线程)。
四、并发工具类:实战中的“高效武器”
1. 计数器家族
- CountDownLatch:
- 场景:等待多个线程完成(如主线程等待所有子线程数据加载完毕)。
- 原理:AQS 的
state初始化为线程数,countDown()递减state,await()阻塞直到state=0。
- Semaphore:
- 场景:控制并发访问数(如数据库连接池最多 10 个线程同时获取连接)。
- 原理:AQS 的
state表示剩余令牌数,acquire()消耗令牌,release()释放令牌。
2. 读写锁(ReentrantReadWriteLock)
- 特性:允许多个读线程并发访问,写线程独占访问(读多写少场景性能优化)。
- 实现:
- 用一个
int变量拆分高 16 位(读锁计数)和低 16 位(写锁计数)。 - 写锁支持重入(记录当前线程重入次数),读锁通过
ThreadLocal记录重入线程数。
- 用一个
3. 原子操作类
- 基础原子类(AtomicInteger/AtomicLong):
- 核心方法:
getAndIncrement()(CAS 实现原子自增)。
- 核心方法:
- 引用原子类(AtomicReference/AtomicStampedReference):
- 解决对象引用或 ABA 问题(如链表节点的安全更新)。
五、总结:从“困境”到“方案”的思维演进
-
难点本质:
- 顺序性 → 任务依赖被破坏;
- 可见性 → 数据更新未同步;
- 原子性 → 操作被中途打断。
-
解决思路:
- 隔离:通过锁(粗/细粒度)或无锁(CAS)保证原子性;
- 同步:通过缓存失效(volatile/MESI)或等待通知(AQS 队列)保证可见性和顺序性。
-
实现层级:
- 硬件级(cmpxchg/lock 指令)→ JVM 级(synchronized/volatile)→ SDK 级(AQS/原子类)。
理解并发编程,本质是理解“如何在无序中建立秩序”。从现实中的买菜做饭、排队叫号,到计算机中的 CPU 缓存、汇编指令,核心思想始终是“协作与同步”。掌握这些底层逻辑,才能在面对高并发场景时,从容选择合适的工具(如用 CAS 优化计数器,用 ReentrantLock 实现公平锁),让多线程协作高效而有序。
来源链接:https://www.cnblogs.com/mrye/p/18857438






没有回复内容